












 互动量:233
互动量:233
上期我们介绍了如何使用STM32F103C8T6来获取HMC5883L数字磁力计的XYZ轴的磁场数据。
并且我们利用磁场数据来计算角度值以及Z轴倾角。
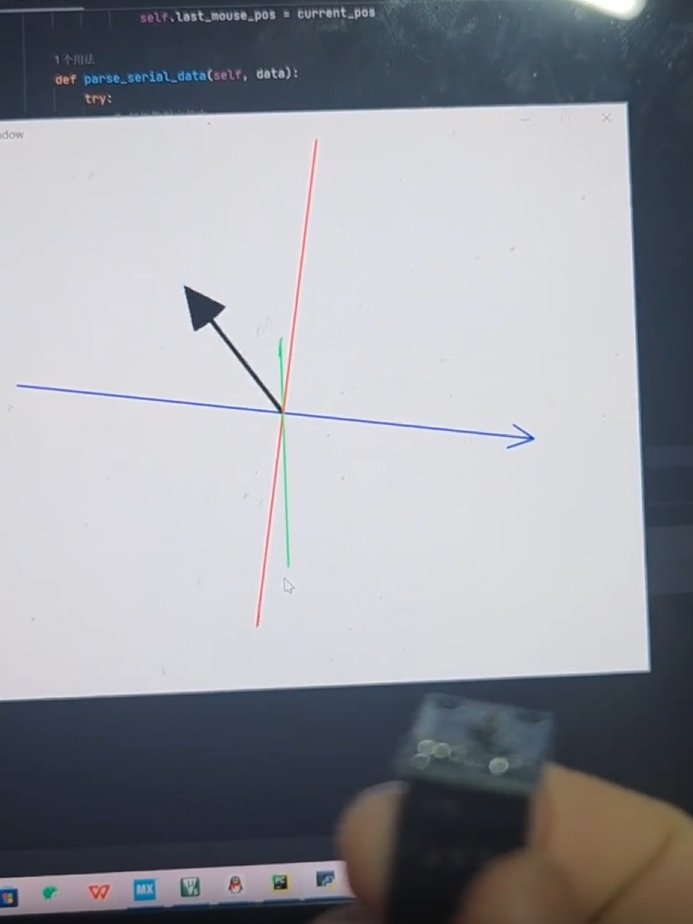
但是这种调试的方法来查看数据确实太捞了,于是我们在这个的基础上,利用Python简单的对数据进行一下三维显示。
在实际的使用过程中发现
主要是通过串口获取数据,之后用两个3D开源库pygame和OpenGL来显示数据。
def parse_serial_data(self, data):
try:
# 解析数据字符串
values = data.strip().split(',')
if len(values)== 3:
h_value = float(values[0].split(':')[1])
m_value = float(values[1].split(':')[1])
i_value = float(values[2].split(':')[1])
self.rotation_x = i_value
self.rotation_y = h_value
return True
except:
return False
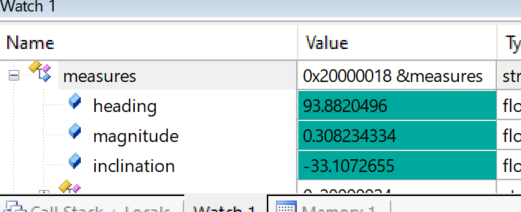
例如这里利用串口获取数据之后,解析获取角度还有倾角。之后绘图进行简单显示,这里就不作过多赘述了。
在使用传感器的过程中我发现:当我的Y轴方向和北极方向重叠(角度为0的时候)Z轴的倾角为30度左右,这个在上期测试的时候就发现了。
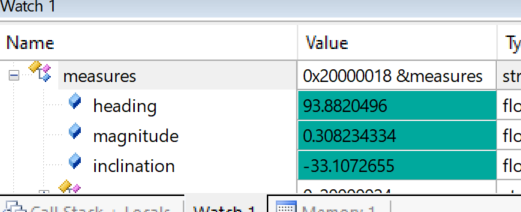
在Y轴方向和磁场南极重合的时候,Z轴倾角为负30度。Y轴方向和在东西方向时则没有偏差,Z轴倾角都是0。
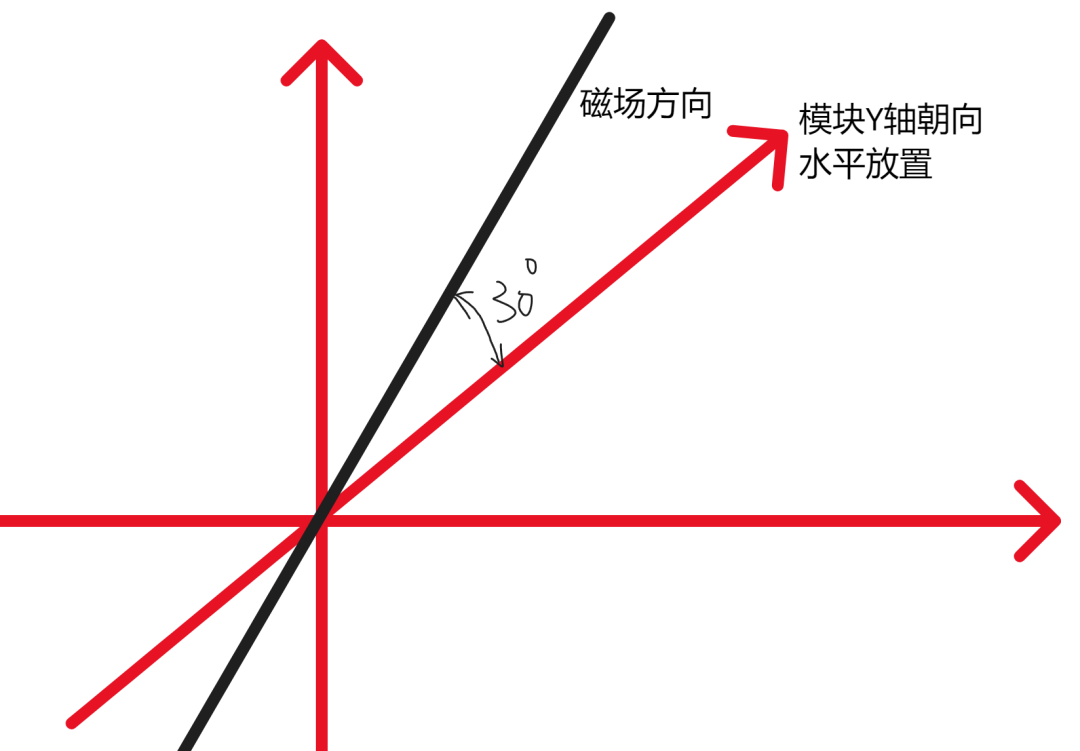
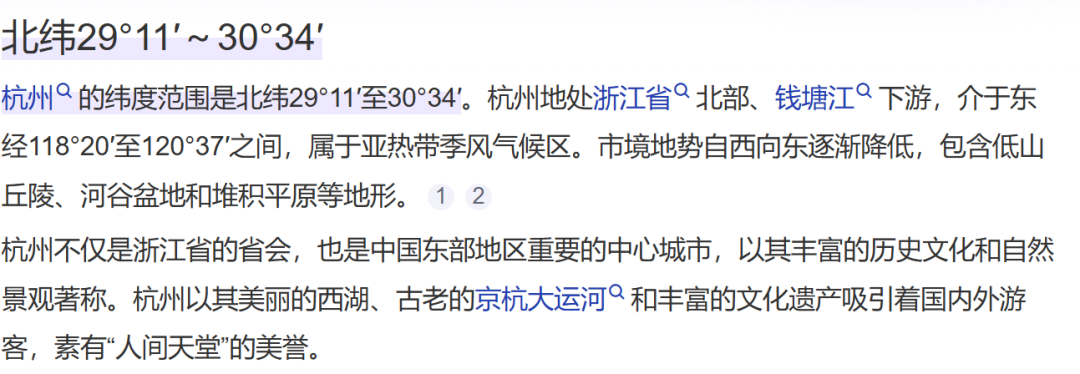
杭州的纬度在30°左右,所以磁场方向和水平角度相差为30°左右,当我把模块方向转过来的时候,就会就正好相反。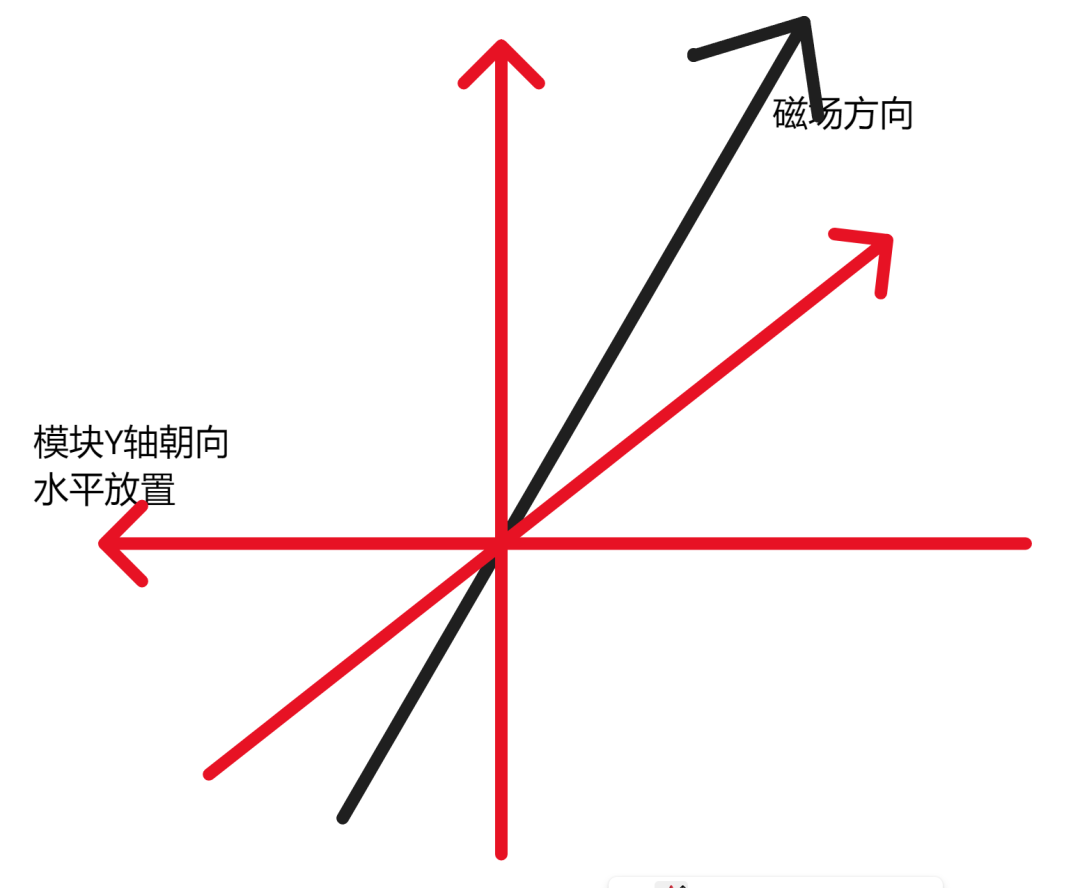
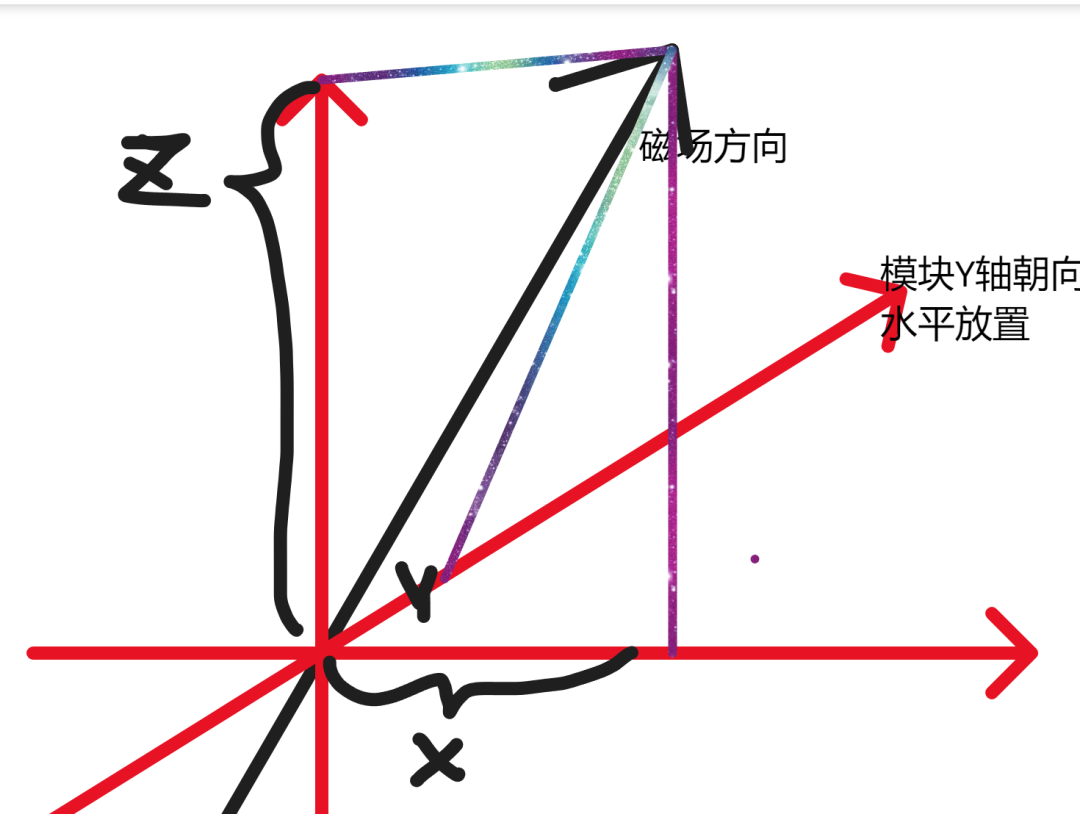
当我们的防止方向在东西方向,由于东西方向不存在磁场,磁场与Y轴正交。因此Z轴的磁场强度分量为0。因此当模块旋转九十度之后,倾角会不变。因此模块在水平摆放的时候,对水平角度旋转的测量极为精确,但是改变倾角,其他角度旋转的时候,就没这么简单了。
这源自于我的计算方法的错误,模块的Y轴指向磁场方向的时候,这时候XYZ坐标和地理意义上的南北极坐标方向一致。(Z轴偏差先不考虑)
但是当旋转了模块之后,其实XYZ的坐标系也发生了变换,并不能简单的用之前的方法来计算XYZ轴。
如果我们记原本的向量坐标为a1=(x1,y1,z1)那么之后我们得到的向量的结果为a2= (x2,y2,z2)。
a2是在a1的基础上通过旋转获得的,因此我们可以找一个旋转矩阵P。
旋转矩阵的表达式可以使用罗德里格公式

在此之前我们需要知道a2和a1的旋转轴,但是由于我们是任意旋转的,不知道旋转轴。因此我们要先假设一个旋转轴v,可以用a1叉乘a2归一化来获得。当然原理比较麻烦,直接上程序:
void calculateRotationMatrix(HMC5883L_Measure_t rawData, HMC5883L_Measure_t measures,float R[3][3]) {
// 1. 提取原始向量和旋转后的向量
float raw[3] = { rawData.gauss.x, rawData.gauss.y, rawData.gauss.z };
float rotated[3] = { measures.gauss.x, measures.gauss.y, measures.gauss.z };
// 2. 计算旋转轴 (叉积)
float axis[3]; axis[0] = raw[1] * rotated[2] - raw[2] * rotated[1]; // y1*z2 - z1*y2
axis[1] = raw[2] * rotated[0] - raw[0] * rotated[2]; // z1*x2 - x1*z2
axis[2] = raw[0] * rotated[1] - raw[1] * rotated[0]; // x1*y2 - y1*x2
// 计算旋转轴的长度 (叉积的模)
float axisLength = sqrt(axis[0]*axis[0] + axis[1]*axis[1] + axis[2]*axis[2]);
// 如果旋转轴长度为0,说明两个向量是平行的,不需要旋转
if (axisLength == 0.0f) {
// 向量平行时,旋转矩阵为单位矩阵
R[0][0] = R[1][1] = R[2][2] = 1.0f;
R[0][1] = R[0][2] = R[1][0] = R[1][2] = R[2][0] = R[2][1] = 0.0f;
return;
}
// 将旋转轴单位化
float kx = axis[0] / axisLength;
float ky = axis[1] / axisLength;
float kz = axis[2] / axisLength;
// 3. 计算旋转角度 (通过点积)
float dotProduct = raw[0]*rotated[0] + raw[1]*rotated[1] + raw[2]*rotated[2];
float magnitudeRaw = sqrt(raw[0]*raw[0] + raw[1]*raw[1] + raw[2]*raw[2]);
float magnitudeRotated = sqrt(rotated[0]*rotated[0] + rotated[1]*rotated[1] + rotated[2]*rotated[2]);
float cosTheta = dotProduct / (magnitudeRaw * magnitudeRotated);
float theta = acos(cosTheta); // 旋转角度
// 4. 使用罗德里格公式计算旋转矩阵
float c = cos(theta); float s = sin(theta);
// 旋转矩阵 R
R[0][0] = c + kx*kx*(1 - c); R[0][1] = kx*ky*(1 - c) - kz*s; R[0][2] = kx*kz*(1 - c) + ky*s;
R[1][0] = ky*kx*(1 - c) + kz*s;
R[1][1] = c + ky*ky*(1 - c);
R[1][2] = ky*kz*(1 - c) - kx*s;
R[2][0] = kz*kx*(1 - c) - ky*s;
R[2][1] = kz*ky*(1 - c) + kx*s;
R[2][2] = c + kz*kz*(1 - c);
}
就可以得到a2 = R * a1;
我们可以通过a2和a1逆推旋转矩阵R。
之后再利用旋转矩阵,分别计算出XYZ三轴的旋转分量。
float radToDeg(float radians)
{
return radians * 180.0f / 3.1415;
}
void extractEulerAngles(float R[3][3], float* thetaX, float* thetaY, float* thetaZ)
{ // 计算绕 Y 轴的旋转角度 (pitch)
*thetaY = asin(-R[2][0]); // 计算绕 X 轴的旋转角度 (roll)
*thetaX = atan2(R[2][1], R[2][2]);
// 计算绕 Z 轴的旋转角度 (yaw)
*thetaZ = atan2(R[1][0], R[0][0]);
// 将弧度转换为度数
*thetaX = radToDeg(*thetaX);
*thetaY = radToDeg(*thetaY);
*thetaZ = radToDeg(*thetaZ);
}
这样子就获得了在原本坐标系下的旋转角度。我们可以用这个值来修正模块姿态变换导致的测量变换。













登录 或 注册 后才可以进行评论哦!
还没有评论,抢个沙发!