












 互动量:376
互动量:376
在我们上一期代码中,我们利用HTTP将我们的数据上传到局域网,但是由于我们的程序是串行程序,即ADC采集完需要等待数据上传成功才能继续运行我们的代码,因此我们的数据就会出现很严重的数据丢失。
而我们在之前学习过STM32中的FreeRTOS即实时操作系统,将不同的任务按照不同的优先级分别运行。因此我们尝试使用FreeRTOS将ADC采集和数据上传的任务按照不同级别的优先级进行划分。
关于FreeRTOS的介绍可以查看前几期的内容基于STM32F407的FreeRTOS学习笔记(13)—— 阶段性的总结与后续
FreeRTOS库准备
FreeRTOS在ESP32中的环境配置比在STM32中简单许多,我们只需要在库管理中搜索FreeRTOS即可安装我们的FreeRTOS
我们直接安装最新版本的FreeRTOS
#include
#include
#include
#include
//FreeRTOS头文件
#include
//任务头文件
#include
//信号量头文件
之后我们放入相关头文件包含信号量和任务头文件还有FreeRTOS的基本头文件。
任务创建
任务创建可以参考我们的公众号文章基于STM32F407的FreeRTOS学习笔记(2)——任务的创建与删除
TaskHandle_t Task1, Task2;
xTaskCreatePinnedToCore(
Task1Code, // 任务函数
"Task1", // 任务名称
10000, // 任务堆栈大小
NULL, // 任务参数
1, // 任务优先级
&Task1, // 任务句柄
0); // 核心编号
// 创建任务2,绑定到核心1
xTaskCreatePinnedToCore(
Task2Code, // 任务函数
"Task2", // 任务名称
10000, // 任务堆栈大小
NULL, // 任务参数
2, // 任务优先级
&Task2, // 任务句柄
1); // 核心编号
我们创建任务1和任务2 的句柄,并且由于ESP32是双核的MPU,比起STM32我们可以将不同的任务绑定到不同的核心进行使用,我们设置两个任务,并且任务1的优先级大于任务2的优先级。
我们将任务1用于ADC采集,任务2用于数据上传。
String postData = "";
String Data;
int dataArray[1000];
// 任务1的函
void Task1Code(void *parameter) {
for (;;) {
for (int i = 0; i < 1000; i++) {
dataArray[i] = analogRead(34);
postData += String(dataArray[i]);
if (i < 1000-1) {
postData += ",";
}
delay(5);
}
//采集完成发送信号量
xSemaphoreGive(dataSemaphore);
Data = PostData;
PostData = "";
}
}
// 任务2的函数
void Task2Code(void *parameter) {
for (;;) {
// 等待信号,表示可以使用postData
if (xSemaphoreTak(dataSemaphore, portMAX_DELAY)) {
HTTPClient http;
http.begin(serverUrl);
http.addHeader("Content-Type", "text/plain");
int httpResponseCode = http.POST(Data);
// 处理响应
if (httpResponseCode > 0) {
Serial.print("HTTP Response code: ");
Serial.println(httpResponseCode);
String response = http.getString();
Serial.println(response);
} else {
Serial.print("HTTP Request failed. Error code: ");
Serial.println(httpResponseCode);
}
}
delay(1000);
}
}
接着我们定义我们的任务函数,关于HTTP的部分参考上一期公众号内容。
我们每次采集好数据之后释放信号量,任务2等待信号量的释放,当任务1释放信号量之后我们上传我们的数据,需要注意的是,此时任务2上传数据时postData依旧在进行改变,所以我们需要用一个新的变量来接受PostData。
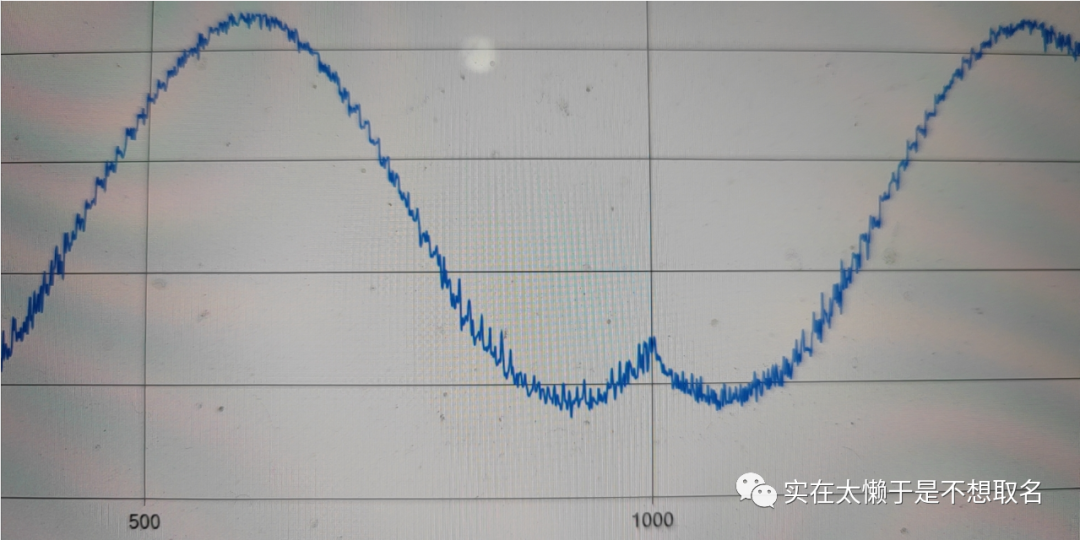
效果展示
我们来看看我们的运行效果

 #include<Arduino.h>#
#include<HTTPClient.h>#
#include<Arduino.h>#
#include<HTTPClient.h>#
嘉立创PCB













登录 或 注册 后才可以进行评论哦!