












 互动量:560
互动量:560

在咸鱼看到有这个小米扫地机的激光雷达配件。说是针对机器报错,走僵尸步,一走一停,激光转头但是扫地机不走,换这个激光雷达就好了。
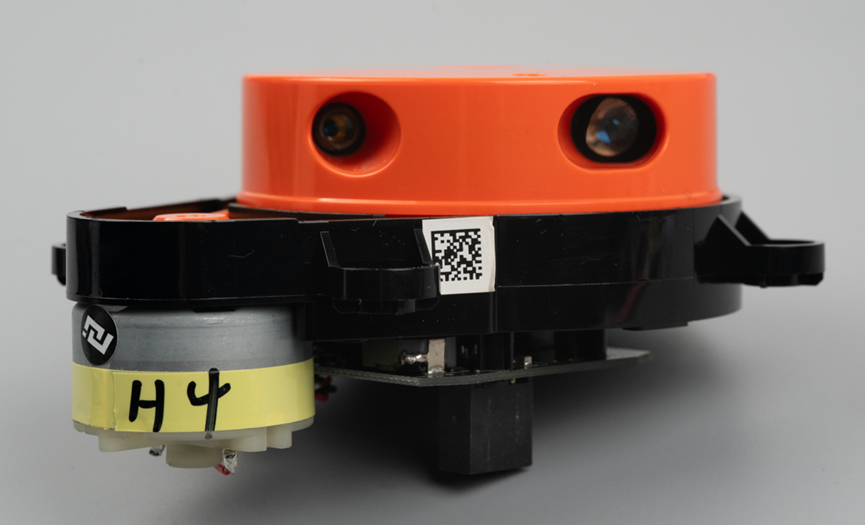
虽然我没有小米扫地机,但是这个激光雷达还是可以拆解一下的。

背面的电路板。

板子上的生产日期是19年15周。
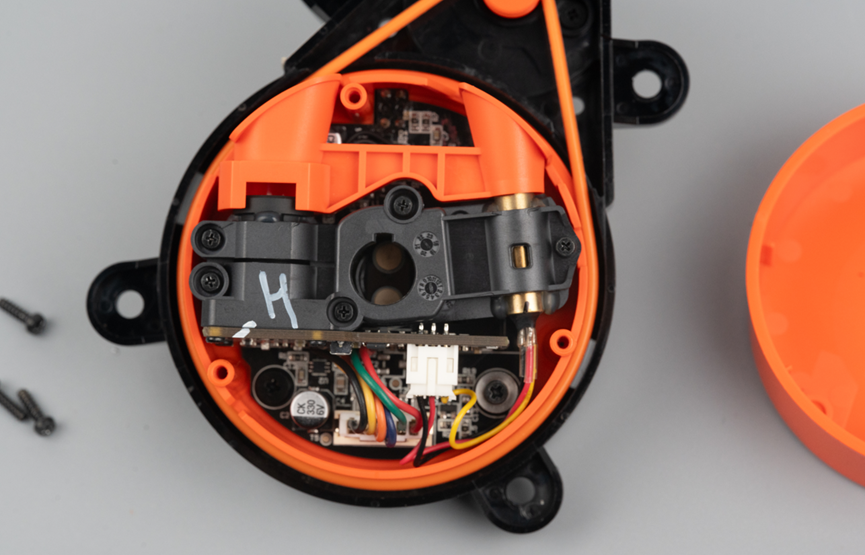
拆解的第一步是给这个橙色的激光雷达头开盖。
里面这个黑色的,就是激光发射接收模组。
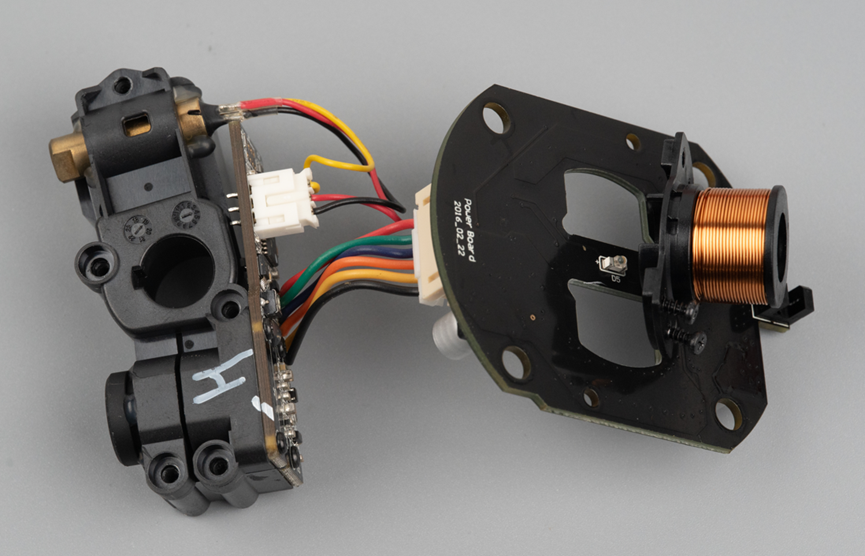
把这个板子拆下来之后,发现了第一个值得拆解的点:激光发射接收模组所在的电路板是可以360度转动的,它和左边的这个结构是通过光通信的。
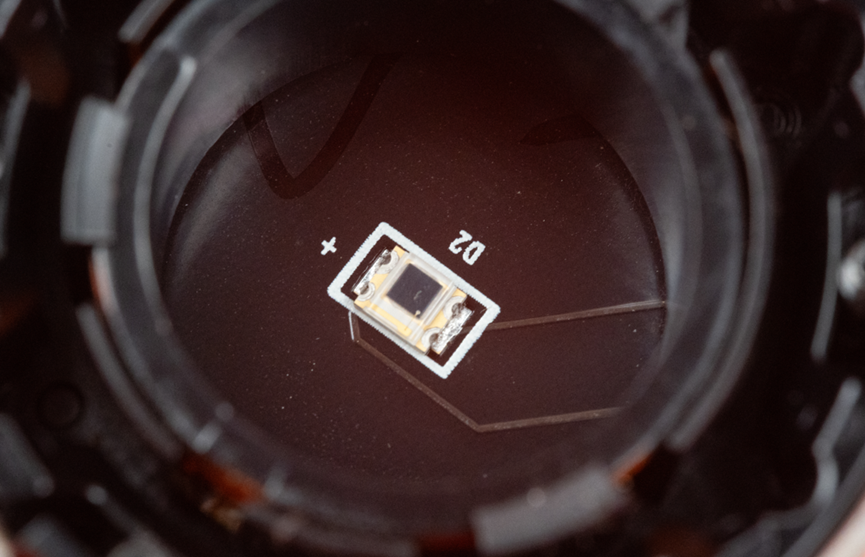
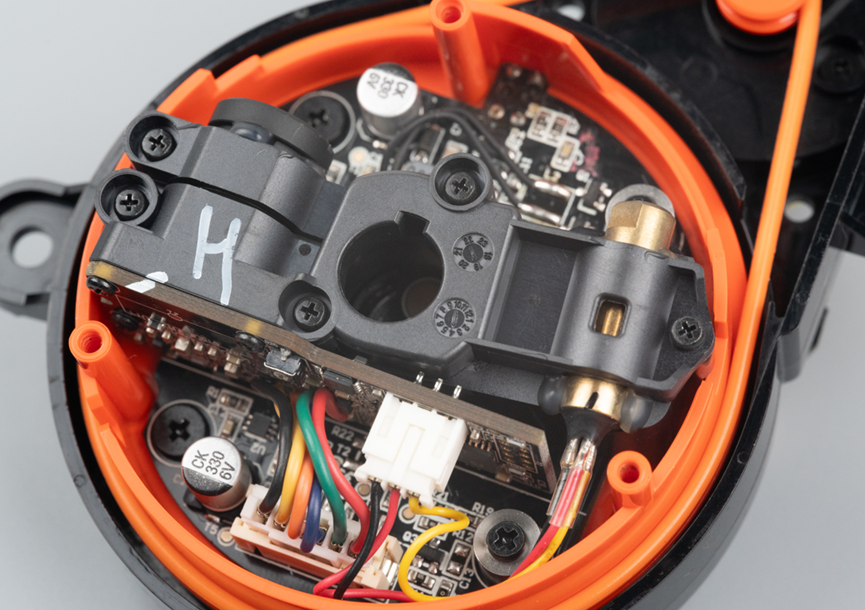
这个D2是接收光的器件。
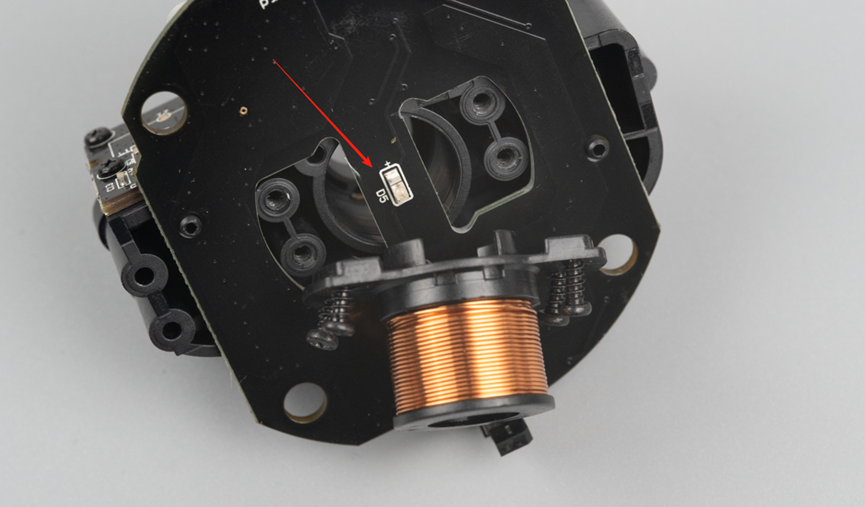
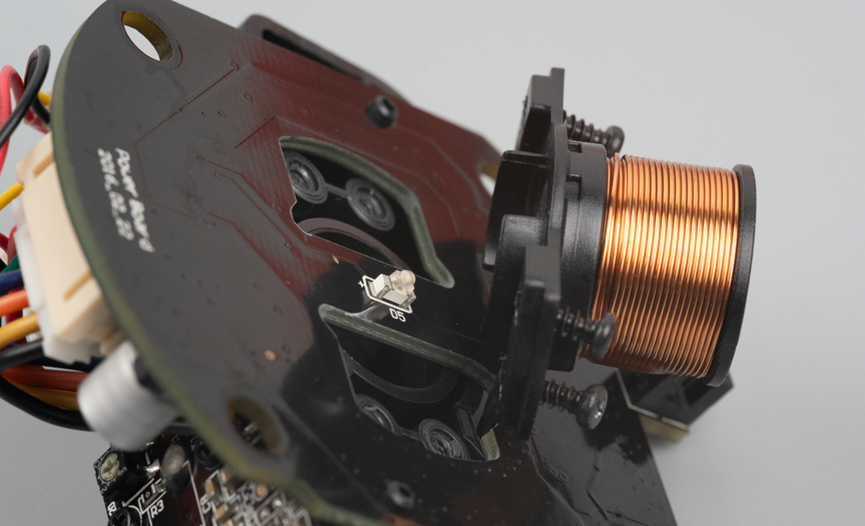
激光发射接收板上的D5是发光器件。
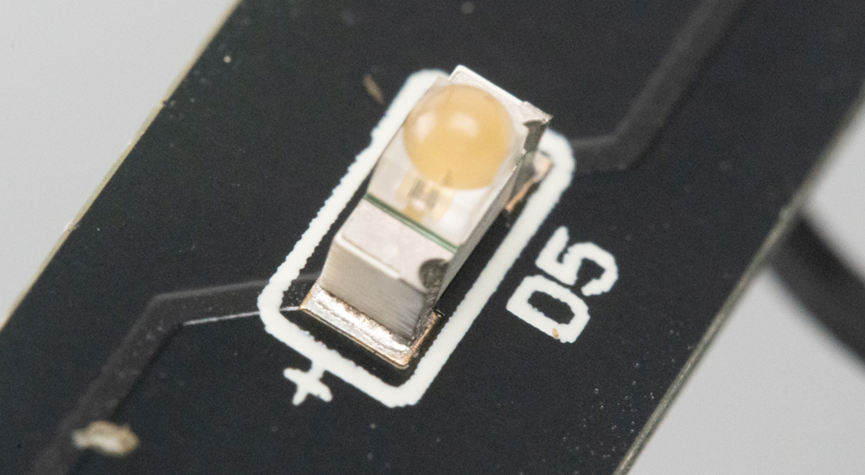
D5特写。由于激光头可以相对扫地机360度旋转,所以如果用导线连接,转动的时候线就会被绞断。这种情况下也可以通过滑环来传动信号,但是这个里面没用用这种方案,而是直接用了光通信。
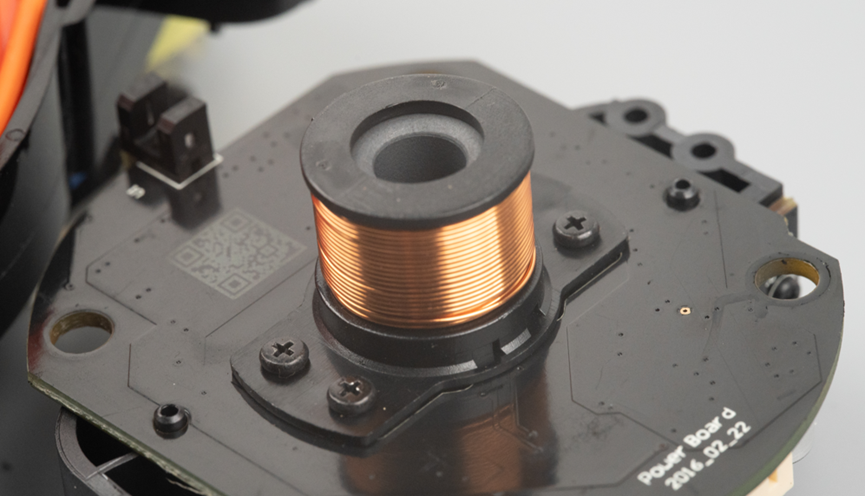
但是光只能进行信号传输,现在还有一个问题就是,要把电从固定部件传输到转动的激光雷达转动部件上。这里采用了电感耦合的方式,类似于无线充电那种。
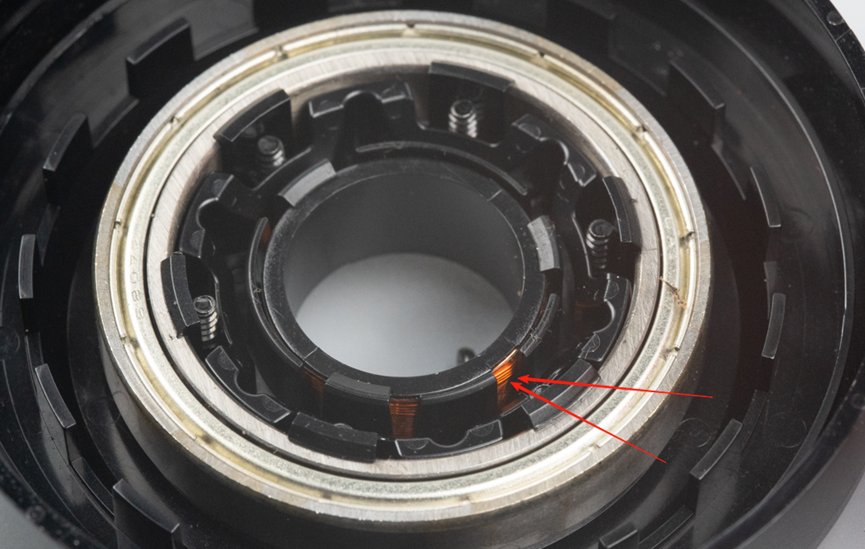
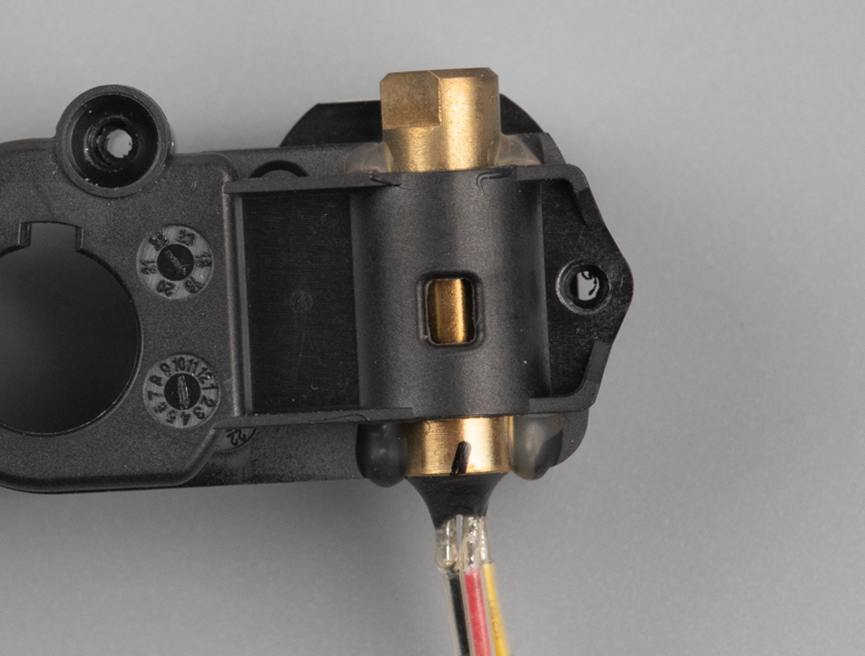
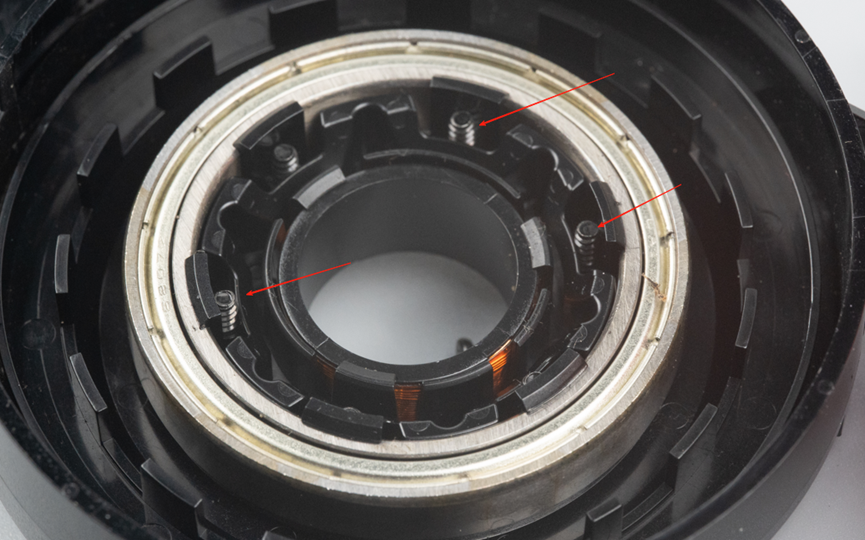
仔细看这个固定部件上的轴承里面的位置,有线圈。
激光发射接受板上的这个线圈就是用来和固定部件上的线圈耦合来实现电力传输的。
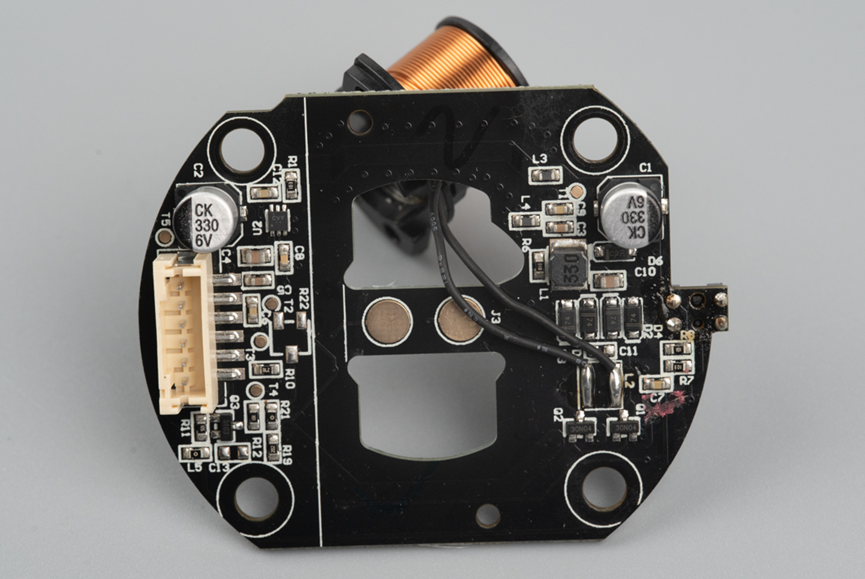
线圈进来之后,也是通过四个二极管进行整流稳压,然后给后端进行供电的。左边的白色连接器,就是用来连接激光雷达模块的。
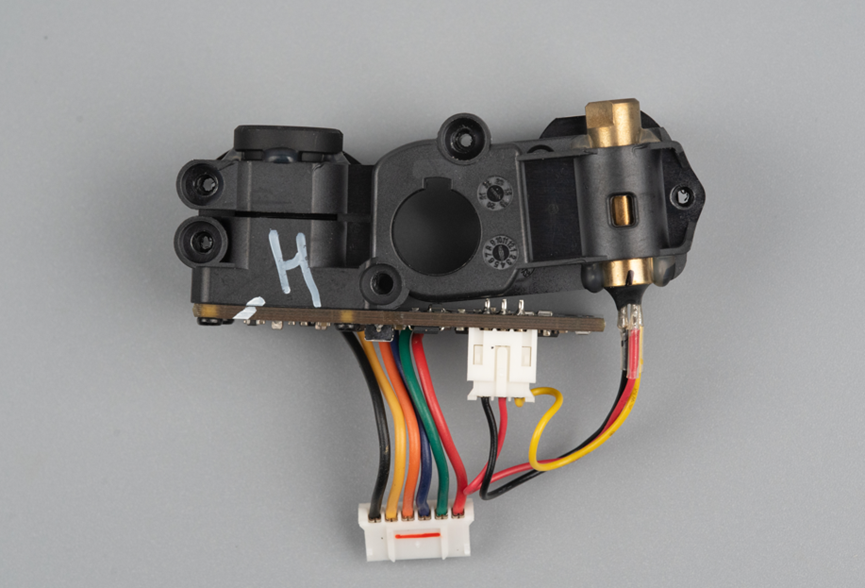
这是连接方式。
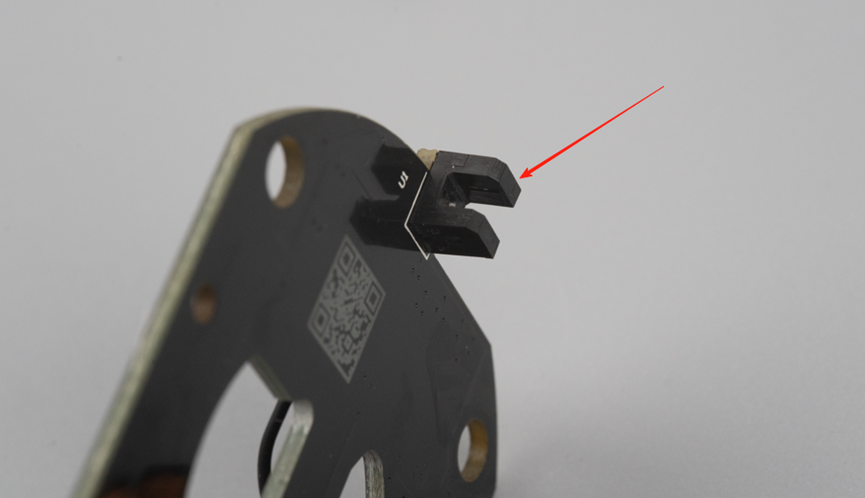
这个板子上还有一个编码器,用来识别转动到什么位置了。

正常电路板安装进去之后,这个编码器刚好对准这个槽里面的断断续续的挡光片。
激光雷达模组,主要由电路板、激光发射管、激光接收部分组成的。仔细观察可以发现激光发射管和激光接收部分是有一定夹角的。
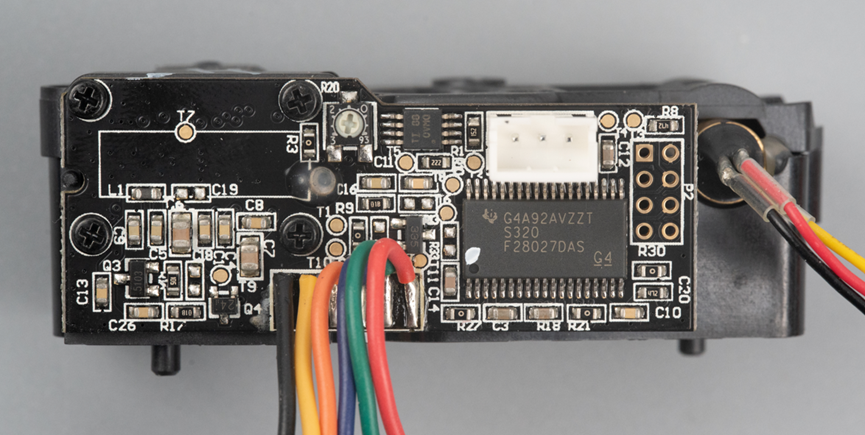
电路板。板子上最核心的器件是TMS320F28027,这是来自Ti的具有60MHz主频、64KB闪存的C2000系列32位数字信号处理器。
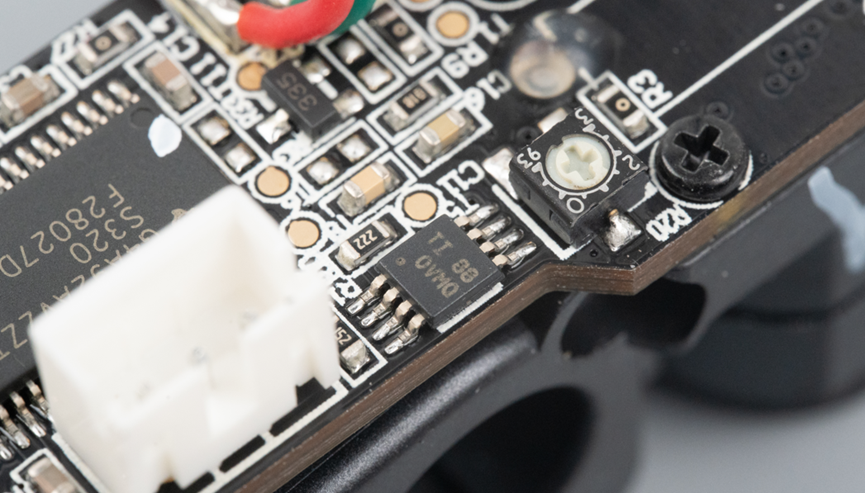
旁边还有一个Ti的运放,型号是OPA2316IDGKR,这是一个双路轨到轨运算放大器。旁边有一个可调电阻。

把板子从光路上拆下来,可以看到接收端用的是是一个类似相机CMOS传感器的器件,我不确定这是APD还是SPAD。

这个器件非常漂亮。下面是1.6mm的FR-4基板,上面是玻璃盖板。
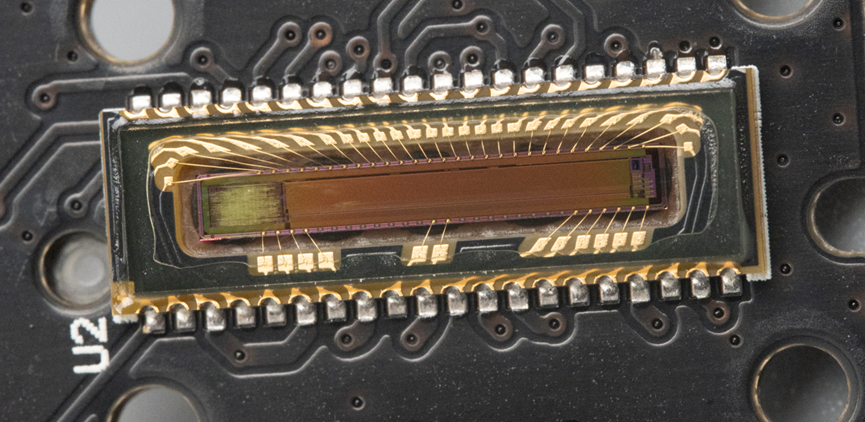
通过玻璃窗可以看到wire bonding。光路上的接收端窗口。
这是激光发射器件,总共三根引线,其中两根是激光发射器的阴极和阳极,另外还有一根是PD信号线,这个是用来反馈光信号。
再回过头看固定部分。
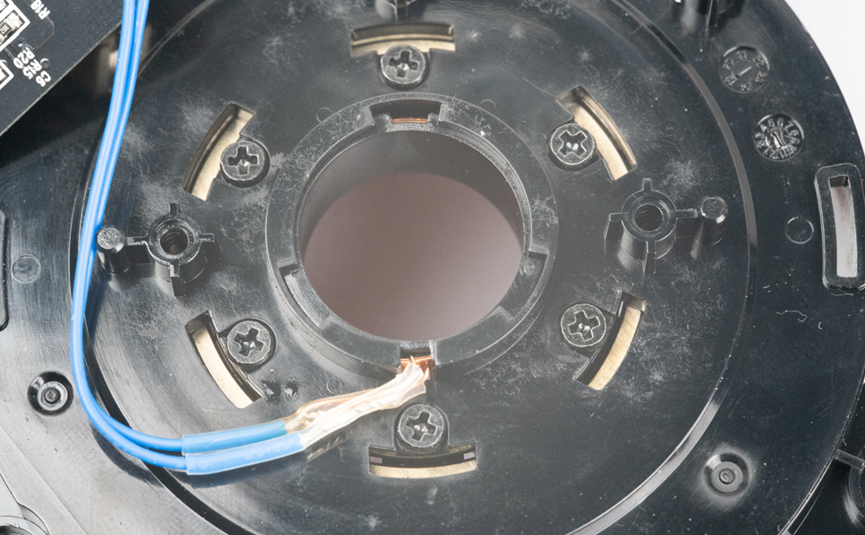
从这里打进去了6个螺丝。
六个螺丝的作用是卡住这个轴承。

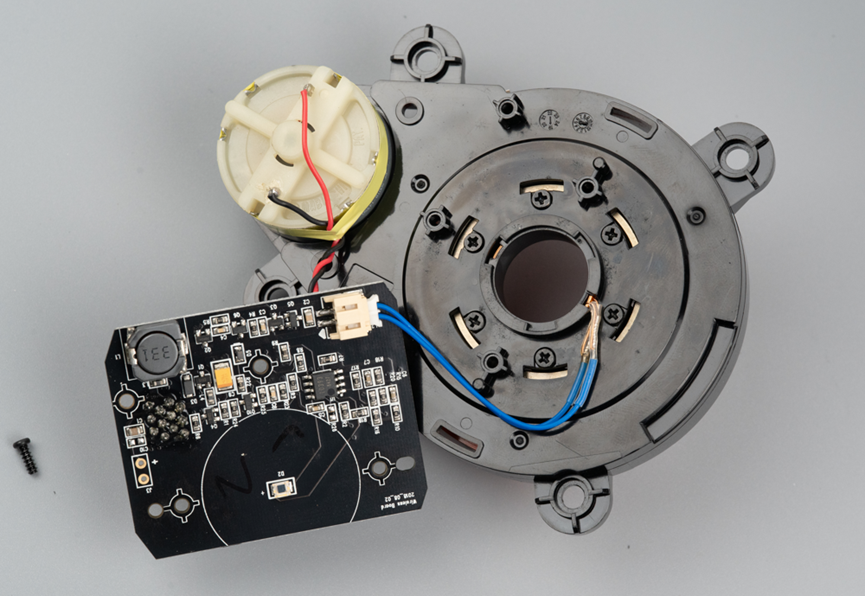
这是电机和电机安装位。设计的很巧妙,电机轴上带了小的皮带轮,所以安装孔旁边还有一个大孔,两个孔是连通的,方便安装带皮带轮的电机。

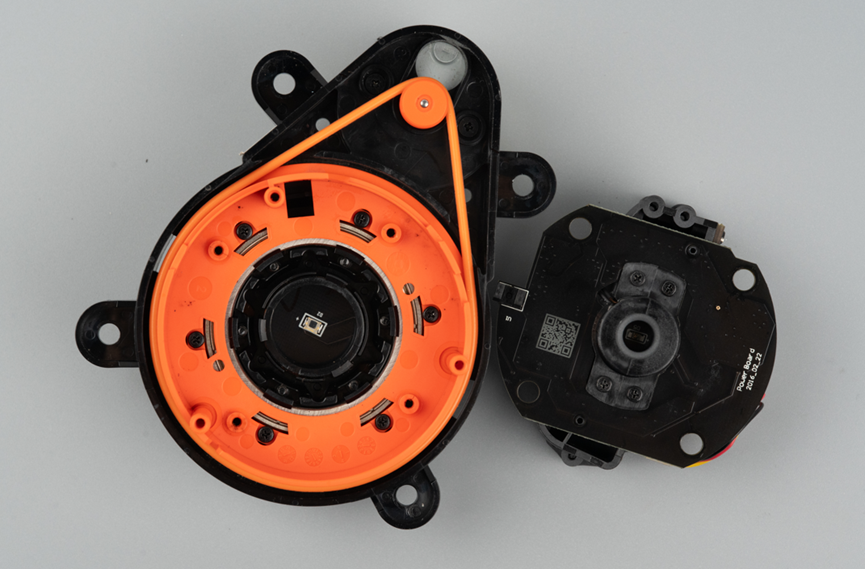
拆下来的轴承。
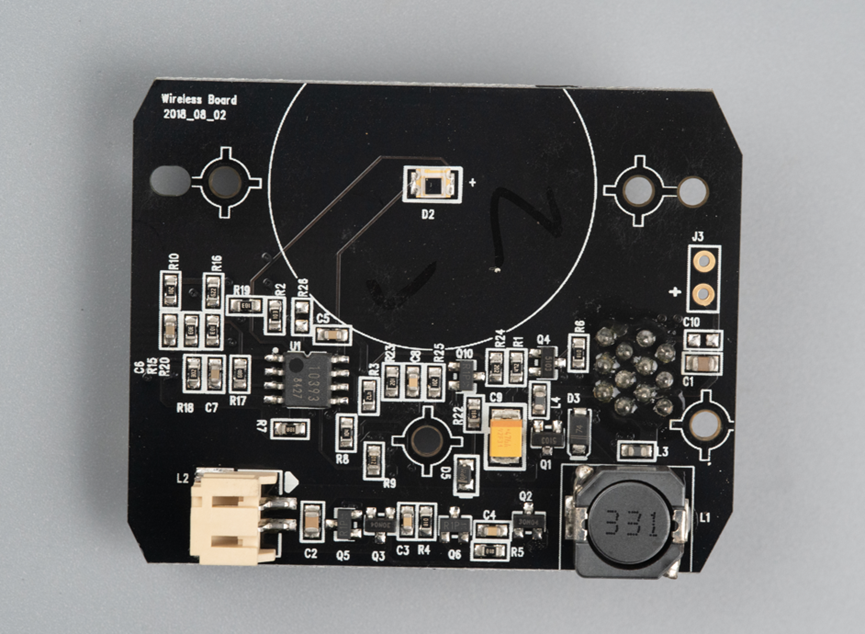
这是固定部件上的板子,写着Wireless Board。这个板子的作用就是:通过线圈给激光雷达转动部件无线供电,通过感光器件接收激光雷达的信号,并把信号最终传输给扫地机。
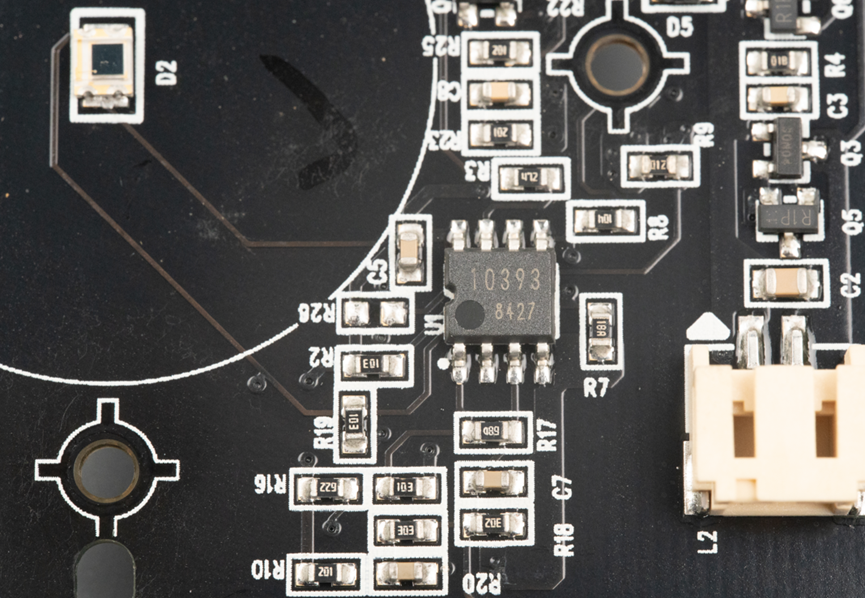
通过这个丝印10393的器件来处理感光器件的信号。
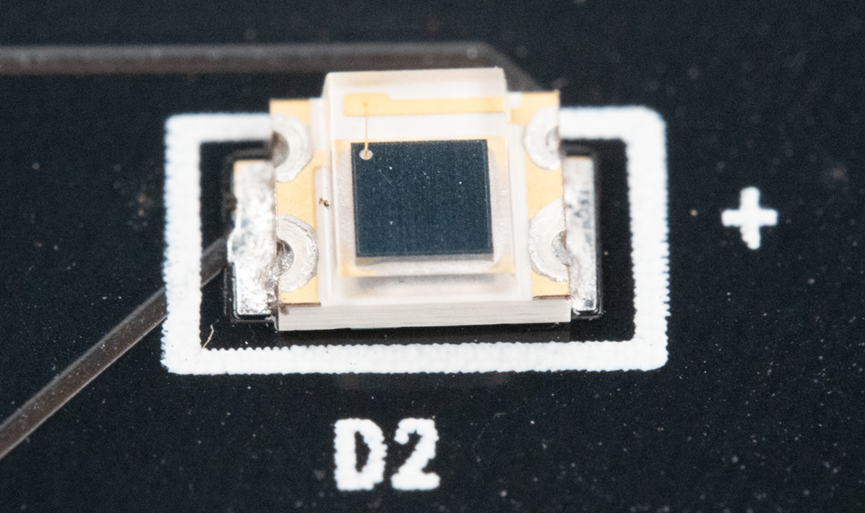
感光器件特写。
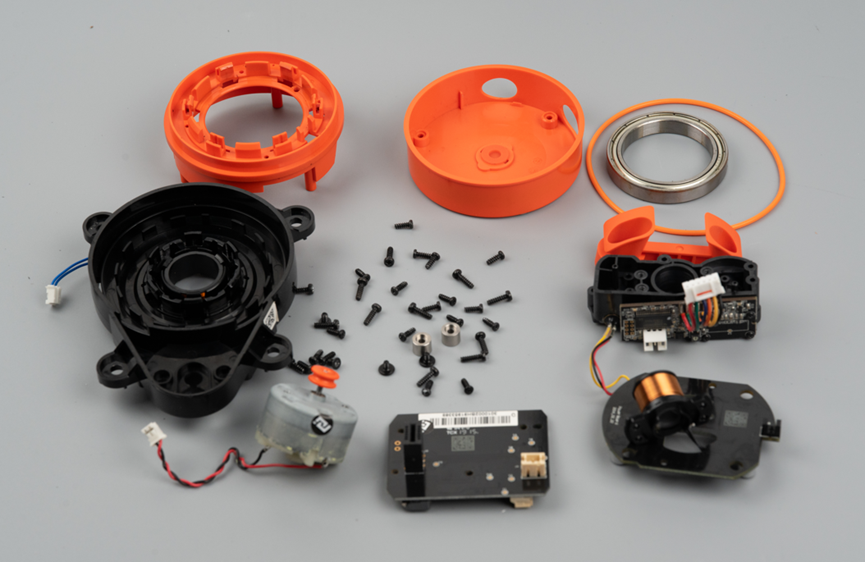
这是这个激光雷达的全家福。#嘉立创PCB#
总体来说,拆解这个激光雷达,看到了很多好玩的设计,由于我的水平有限,能表达出来的太少了,而且很多精妙的设计我可能也看不出来,欢迎大家交流讨论。
 #嘉立创PCB#
#嘉立创PCB#













登录 或 注册 后才可以进行评论哦!