












 互动量:1051
互动量:1051
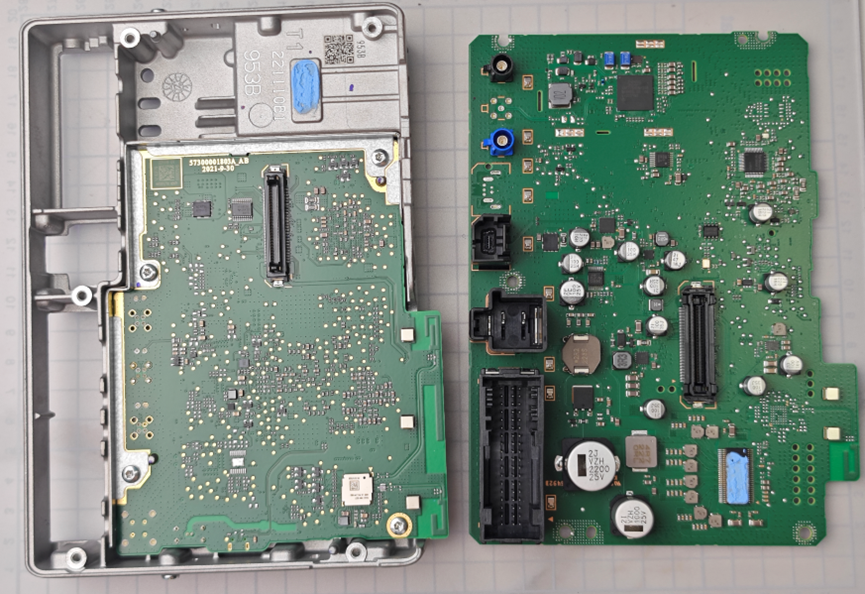
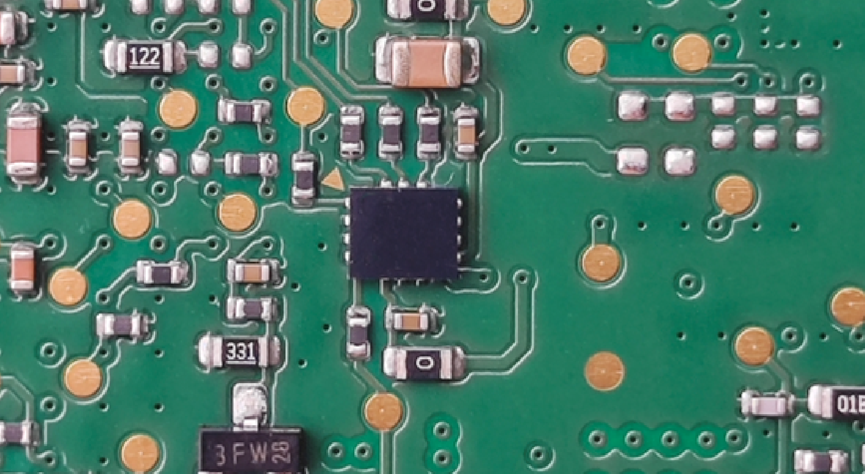
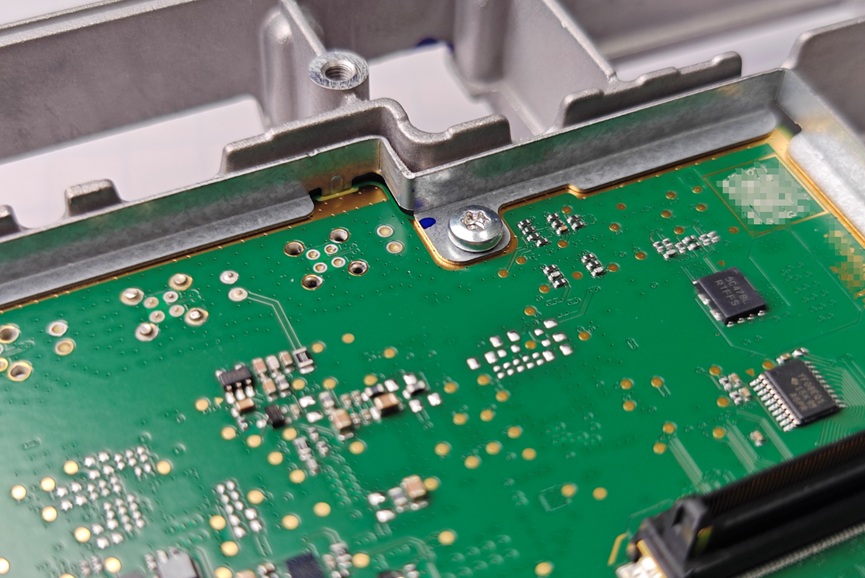
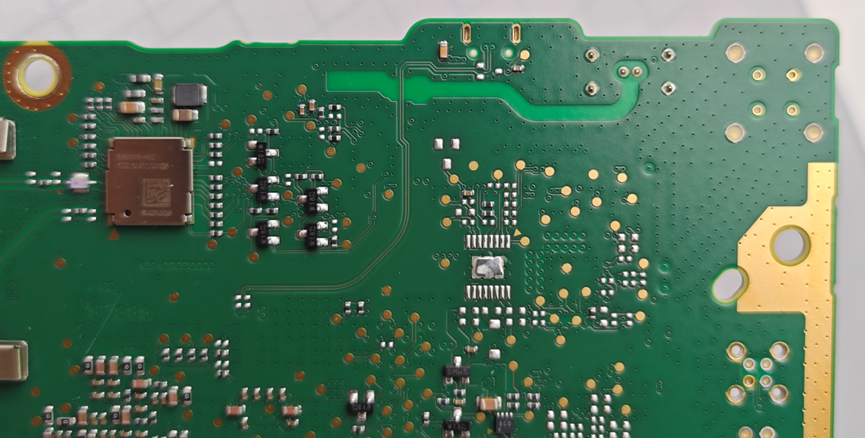
今天要挤的牙膏是这个车机的最后一篇,多媒体处理板背面的器件和布局布线,PCB照片,已经标注了器件索引,对应后面器件清单的索引数字。
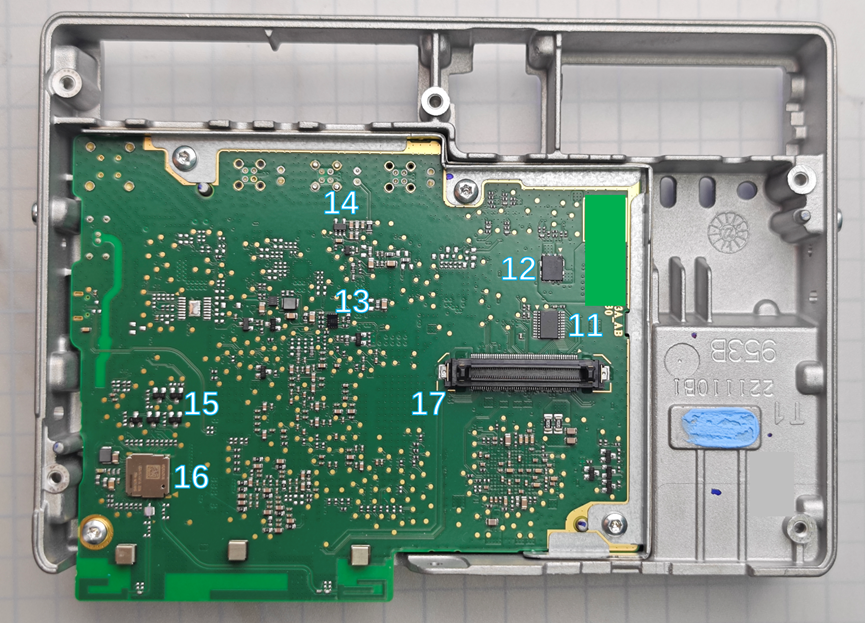
器件清单。

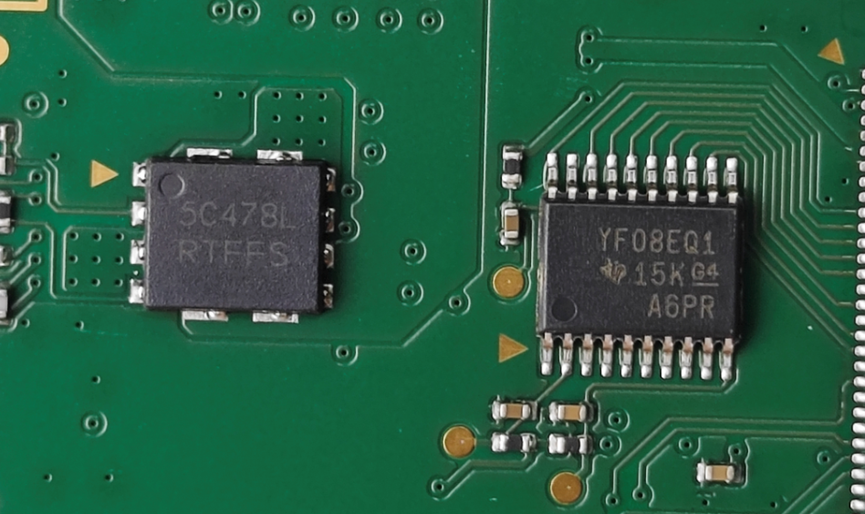
索引11:TXS0108E-Q1,Ti的双向电压电平转换器,封装为TSSOP-20。
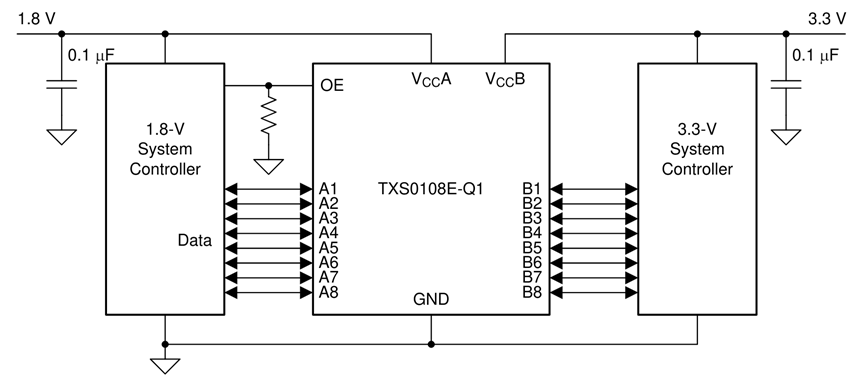
电平转换器的功能就是转换电平。一般应用于两个不同的逻辑电平之间的信号传递,比如某一个子系统是3.3V逻辑电平,另一个子系统是1.8V逻辑电平,那这两个子系统怎么通过串口通信呢?就可以加一个电平转换器来实现,像下面这样。
索引12:NVMFD5C478NLT1G,这是来自安森美的双N MOSFET,40V,14.5mΩ,29A。在索引11的图中左侧。
索引13: 看封装是LGA-14,推测应该是个姿态传感器,三轴加速度计加三轴陀螺仪。
车机上为啥要用到姿态传感器?其实很简单,想想汽车的导航就是由车机完成的,而导航的时候,坐标来源正常情况下是GPS或者北斗等卫星导航数据,这也就能解释为啥前面的板子上会有卫星接收芯片了。那么不正常的情况下,比如汽车进入隧道了,或者在经过桥洞等各种突然失去GPS连接的情况下,导航为啥还在继续呢?
这就要体现到姿态传感器的功劳了,使用加速度计测量车辆行驶过程中的加速度,进而积分出速度、二次积分出位移,通过陀螺仪积分可以获取到转动角速率,通过积分可以得到转动的角度。当然,实际使用的时候,可以使用比较复杂的算法、比如互补滤波、四元数、扩展卡尔曼算法等方式,来通过姿态传感器的原始数据,更精确地获取到汽车行驶的相关数据。从而实现车辆失去卫星导航数据的情况下通过惯性导航来为用户提供导航。
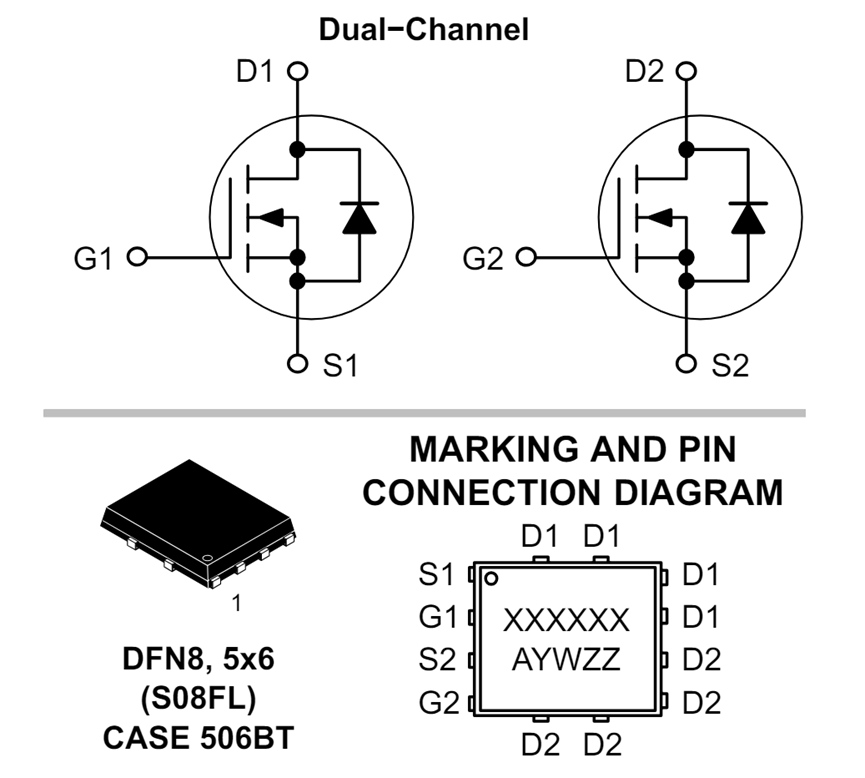
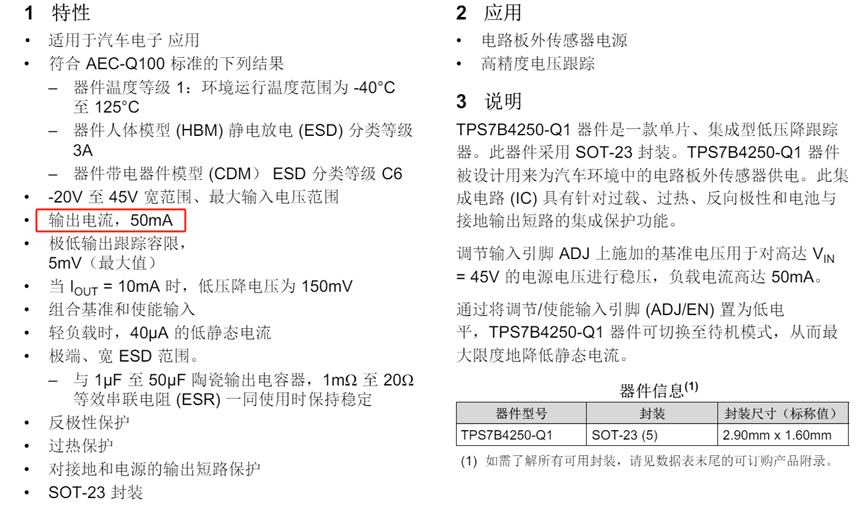
索引14: TPS7B4250QDBVRQ1,这是一颗Ti的LDO,封装为SOT23-5。

这个LDO的最大输入电压是40V,输出电压为1.5-18V,从这一点来看,这个LDO的输出电流不会特别大。因为当输入40V,输出即便是18V的时候,也会有22V压差,输出电流乘以这个压差就是要耗散在LDO上的热功率。而这种SOT23封装又不具备比较好的散热性能,所以电流不会太大。事实是这个LDO的输出电流只有50mA。
说到LDO,我去年自己使用分立器件搭了一个LDO,但是实际运行效果并不好。
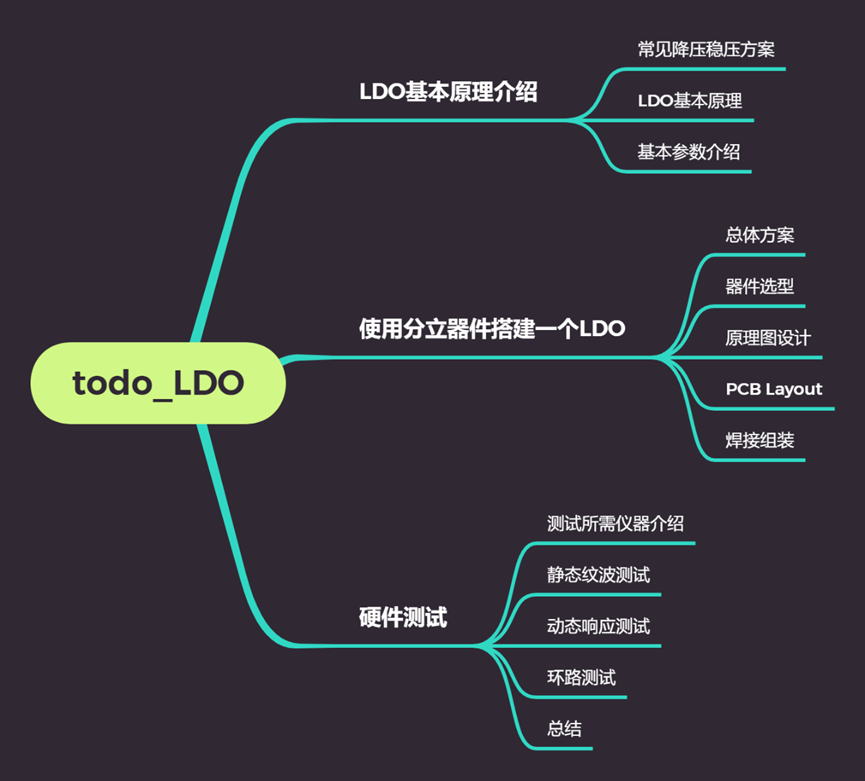
在搭建的过程中,甚至产生一个基准源都成了最大的问题,尝试过稳压二极管、基准电压源芯片、使用三极管搭带隙基准源等。最终出来的产品,输出电流大了就停止输出了。整个过程蛮好玩的,也通过这个搭建的过程对LDO的一些参数和使用有了更深的理解。
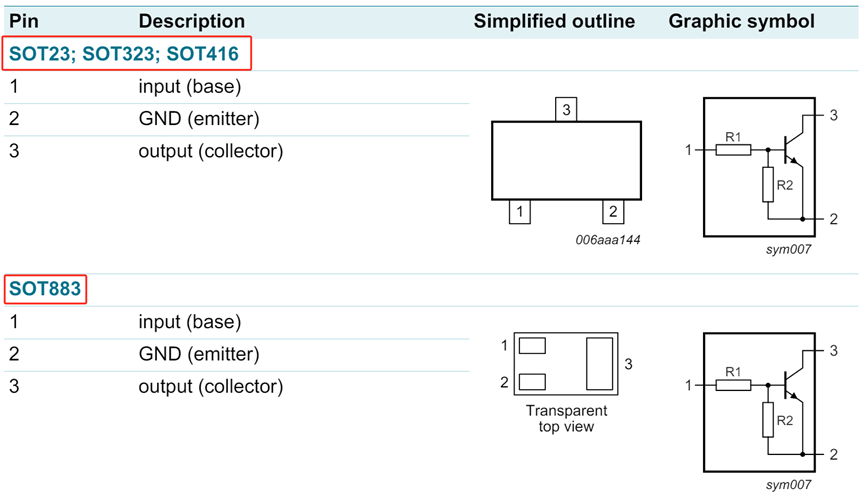
索引15: PDTC143ZT,215,这个三极管是安世半导体的,内置了预偏置电阻。
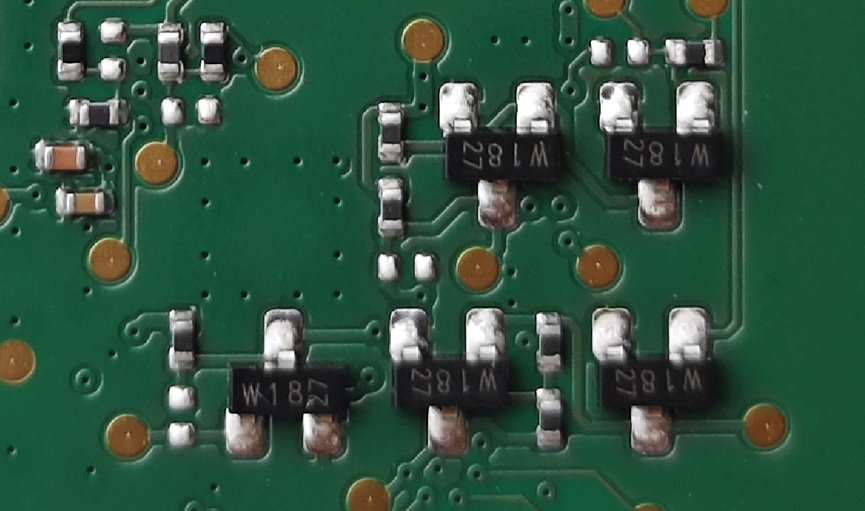
其中电阻R1的阻值是4.7K,R2的阻值是47K。假如要做的产品对板子的尺寸比较敏感,需要做小,可以采用这种带预偏置电阻的三极管。而且这种三极管有SOT883封装,尺寸为0.9x1.3mm,这个尺寸比一个0603电阻还小。
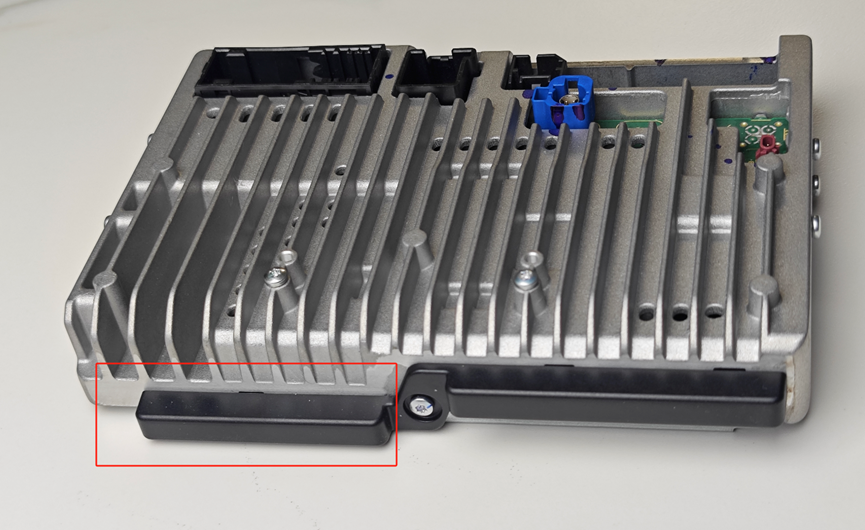
索引16:DWM-W337,这个是来自MinebeaMitsumi的一个wifi+蓝牙模组。
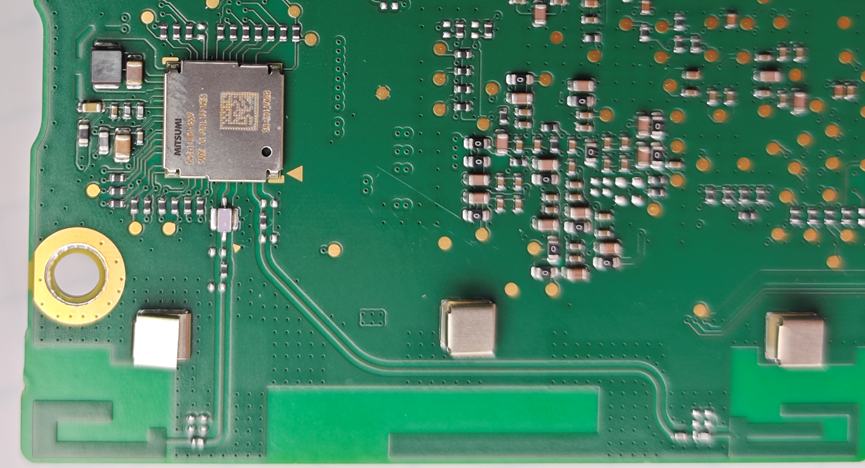
可以看到这个模组的两个天线都是PCB天线,天线所在的PCB伸出车机模组外面,然后再上面套了一个黑色塑料件,用来保护PCB板。
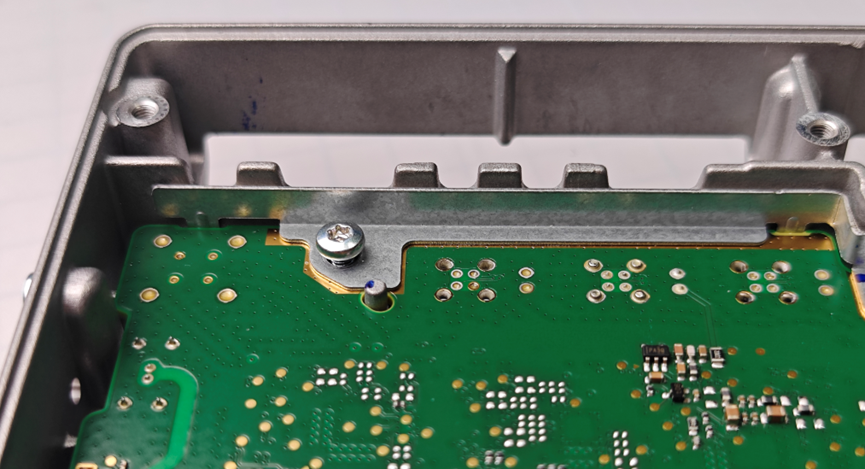
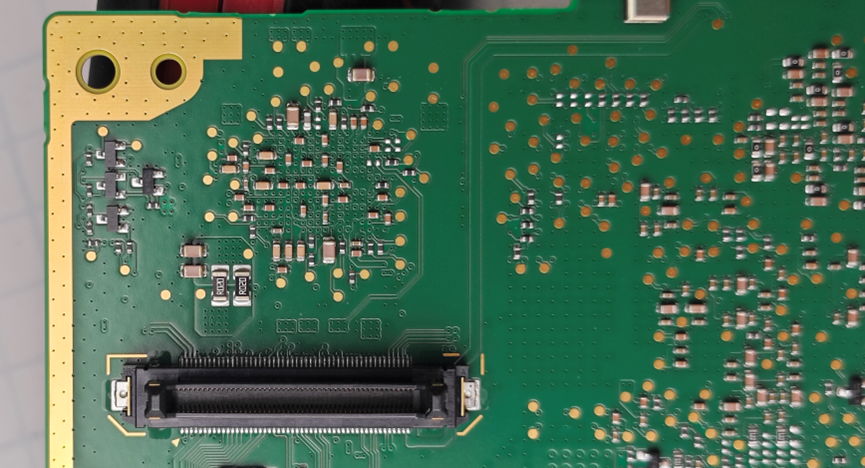
索引17:来自HRS的浮动连接器
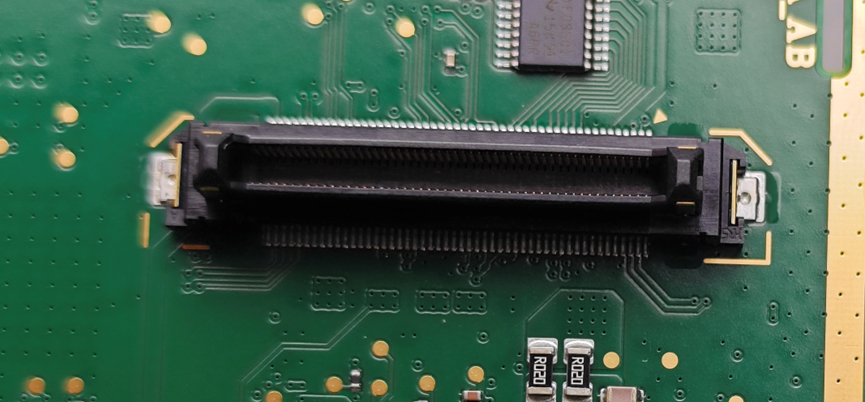
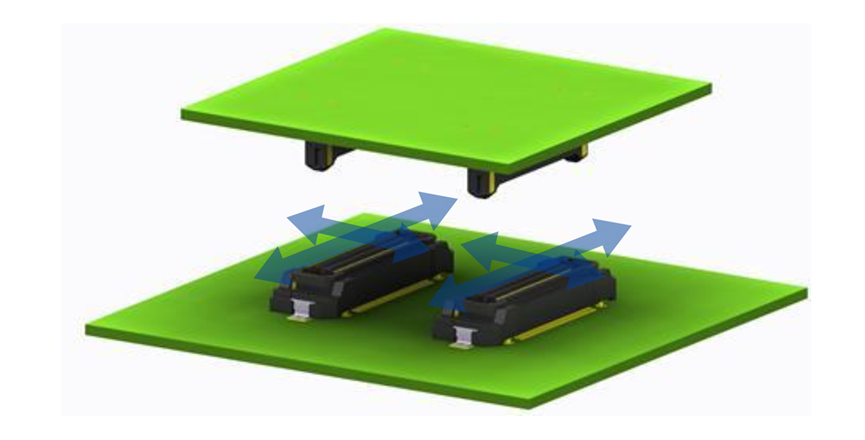
用这种浮动连接器的作用主要是为了吸收基板安装公差。
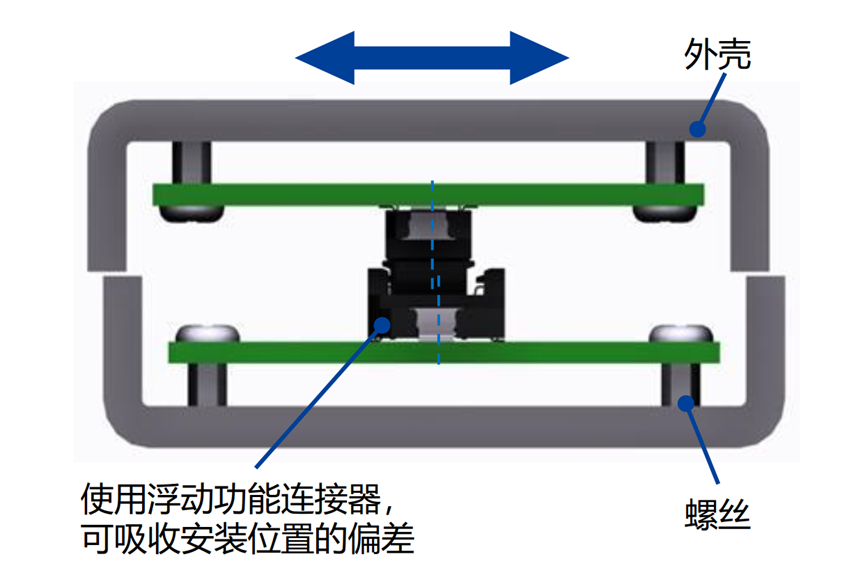
尤其是同一个基板上有多个连接器的时候,如果贴片的时候,有轻微的误差就会导致无法同时插入连接器(除非限位孔的尺寸设计的恰到好处)。这时候,浮动连接器的优点就体现出来了。
芯片说完了,再来几张高清图。
到此为止,蒙迪欧车机这个牙膏总算是挤完了。我自己通过这个过程学到了不少东西,但是由于我表达能力太差,所以很难用文字把学到的东西都分享出来。













登录 或 注册 后才可以进行评论哦!