












 互动量:1114
互动量:1114

前天发了一个小米扫地机激光雷达拆解(20元淘个小米扫地机激光雷达,拆解发现转动部分信号),文章发布之后,有好几个大佬在留言区纠正了我文章中的错误:这种激光雷达用的测量原理不是TOF,而是三角测距原理。简单来说就是不同距离的目标,其发射回来的光,打在CMOS传感器上的位置是不一样的。下面是三角测距原理和TOF测距原理的区别与比较。

今天再拆解一个扫地机激光雷达。

很显然这个板子是绿色的,和上一个拆解的黑色板子的完全不同。

传动皮带是隐藏在壳子里的。
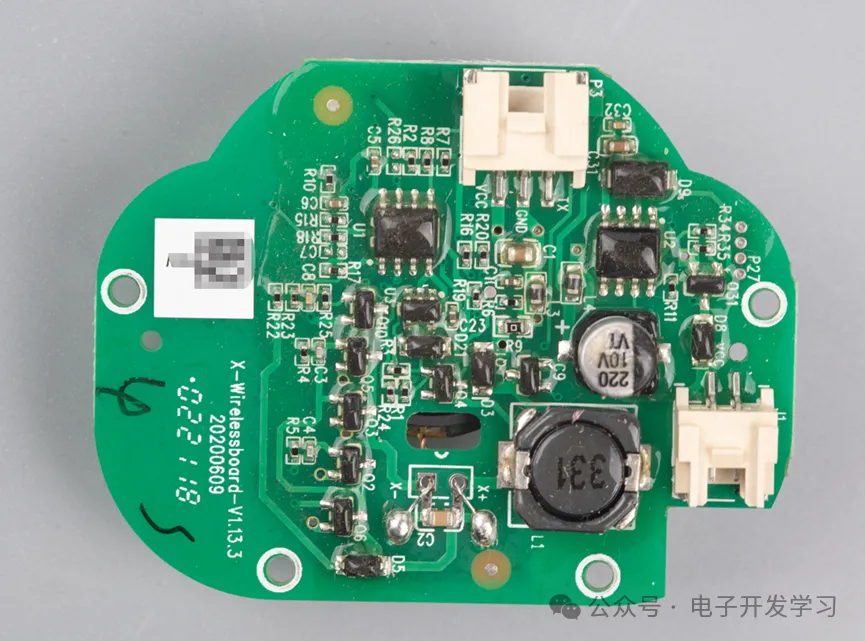
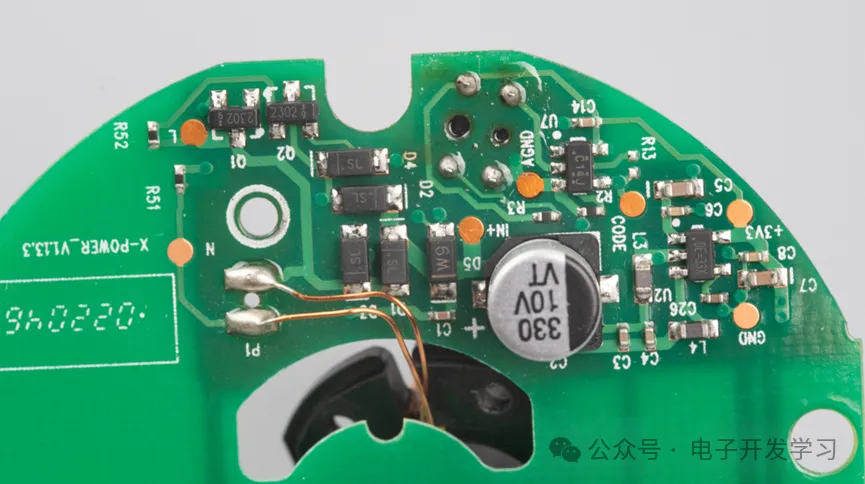
先把这个接口板拆下来。看丝印,这个板子应该是2020年设计的,21年18周生产的。
采用了无线耦合供电方案。
这个对外接口只有三个引脚,电源、地、发送。
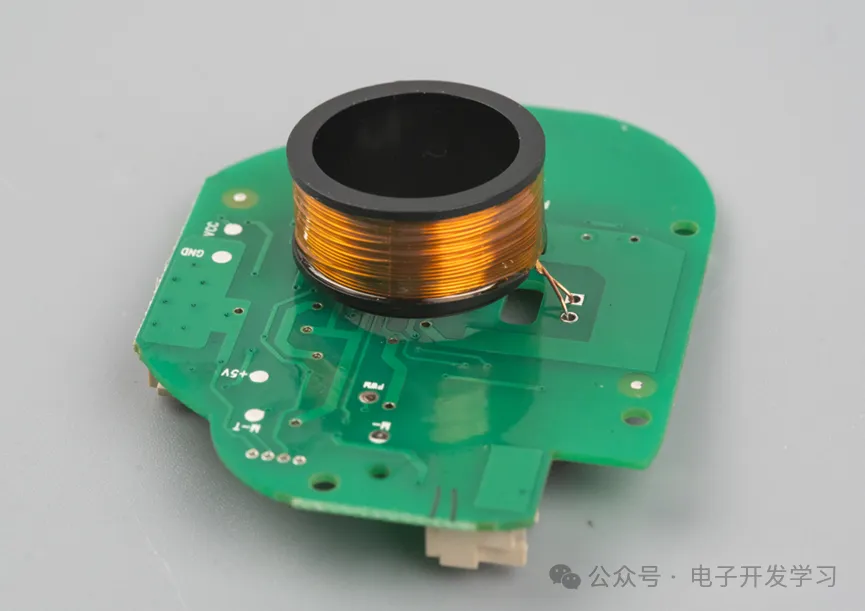
板子背面也是无线供电线圈。传统滑环方案容易磨损,而这种光通方案,避免了物理接触,理论上来说增长了使用寿命。
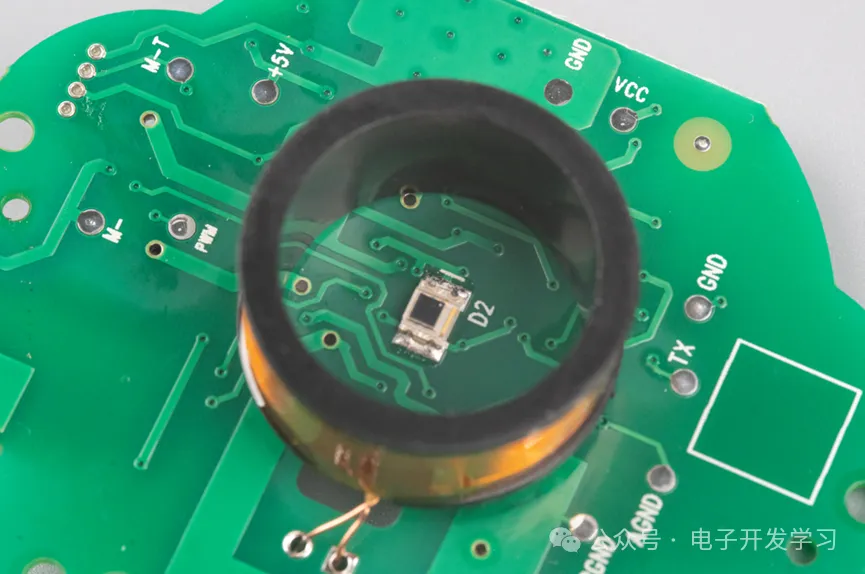
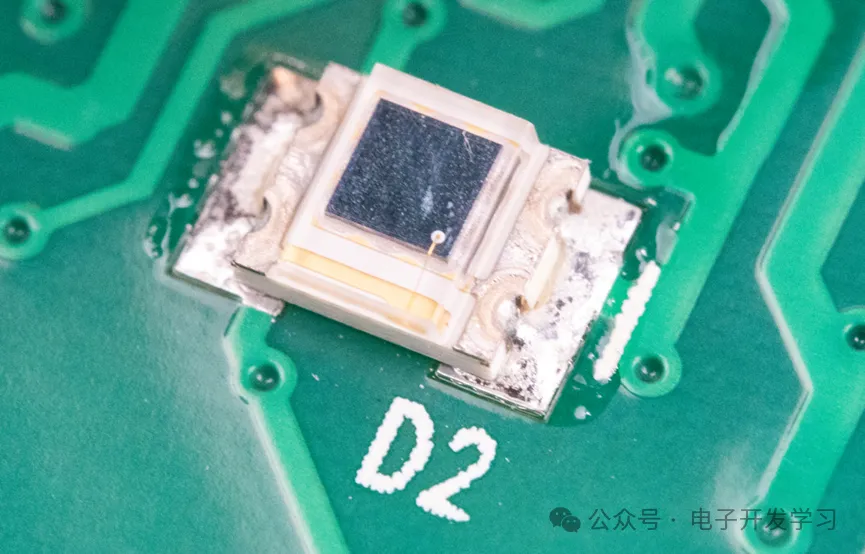
线圈中间的板子上是光通信的探测器。
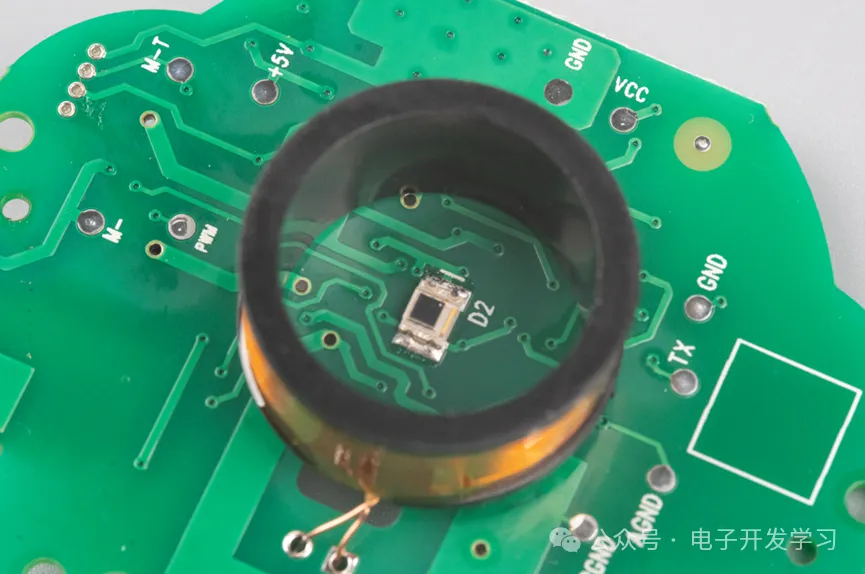
探测器细节。最简单的光通方案可能就是LED调制信号,接收端使用光敏二极管接收或者光电二极管接收,然后采用跨阻放大器(TIA)转换为电信号即可,实际上整个发射接收合起来相当于是一个光耦。
这是电源传输的另一个线圈。

这个激光雷达的皮带是黑色的,外面有塑料壳保护。

皮带轮。

拆掉橙色的顶盖,就可以看到激光发射接收装置。

还是绿色的板子好,PCB布线看得非常清楚。

激光发射器直接连接到了底板上,激光接收板上有一个LQFP-32封装的芯片,板子一端通过连接器引到底板上。
激光发射接收模组拆下来之后。

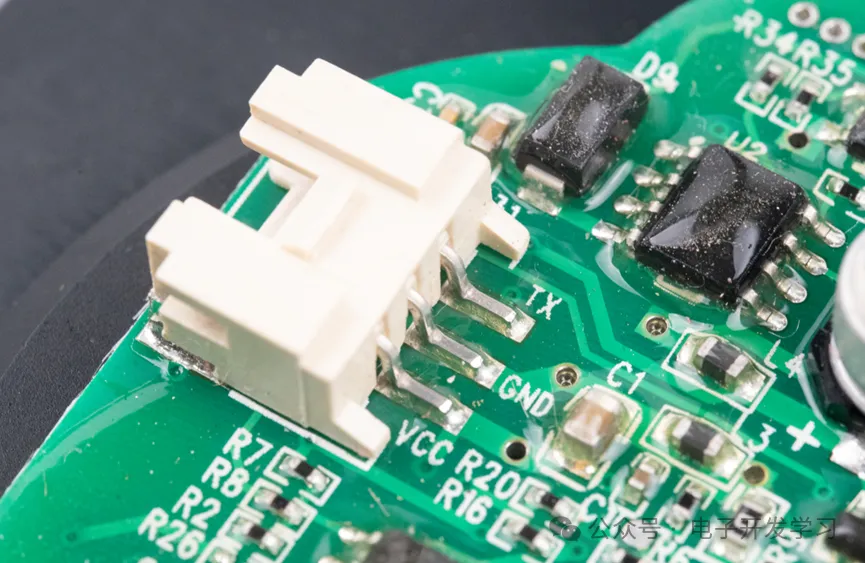
我留意到一个细节,这个连接器是SH1.0的,但是也带锁,这种座子比GH1.25看起来好用多了。我以前的认知中,SH1.0这种形式的都是不带锁的,因为有了这种固有的错误认知,我就不会再去寻找带锁的SH1.0连接器,今天看到了,也算是更新我的知识库了。
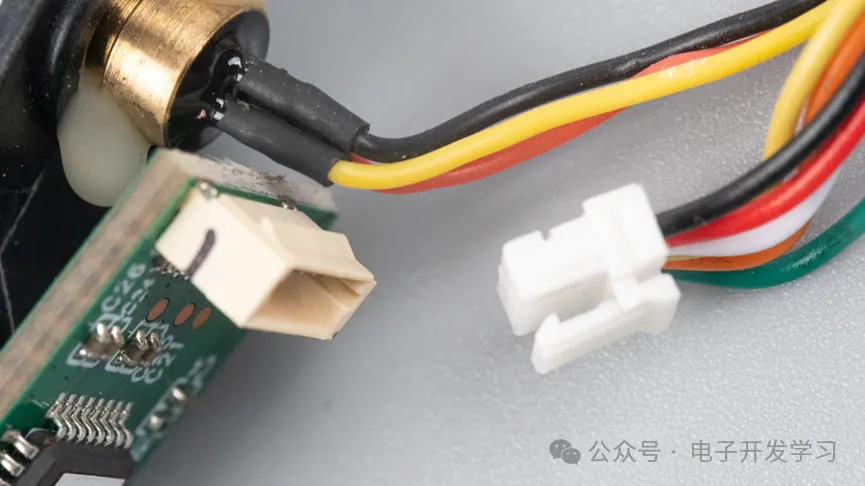
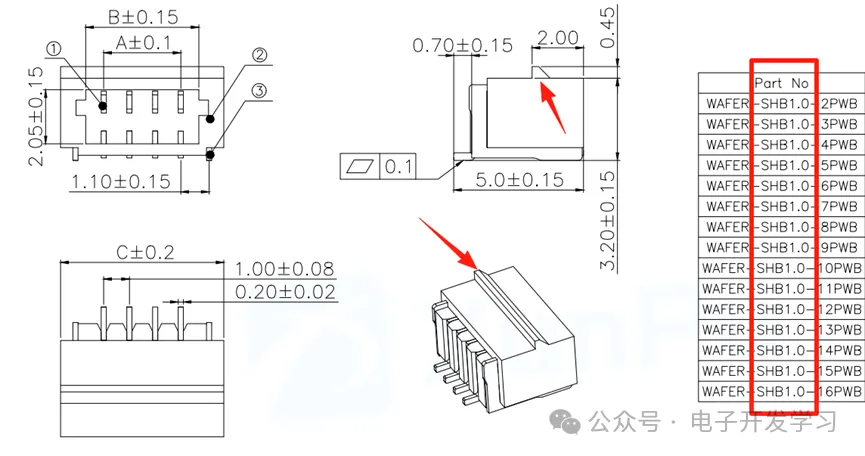
专门去搜了一下,这种带锁扣的SH1.0座子,精确的叫法是SHB1.0。这可太棒了,以后我做产品就用这种座子。
线束的质量也不错,很柔软。两端也是这种带锁扣的SHB1.0公头。

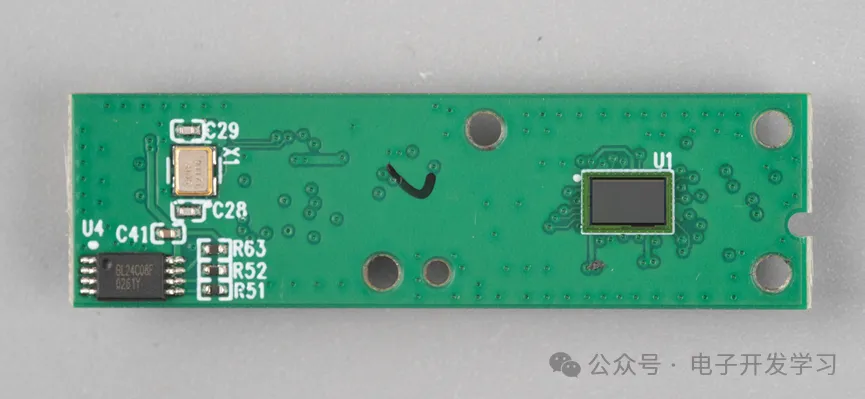
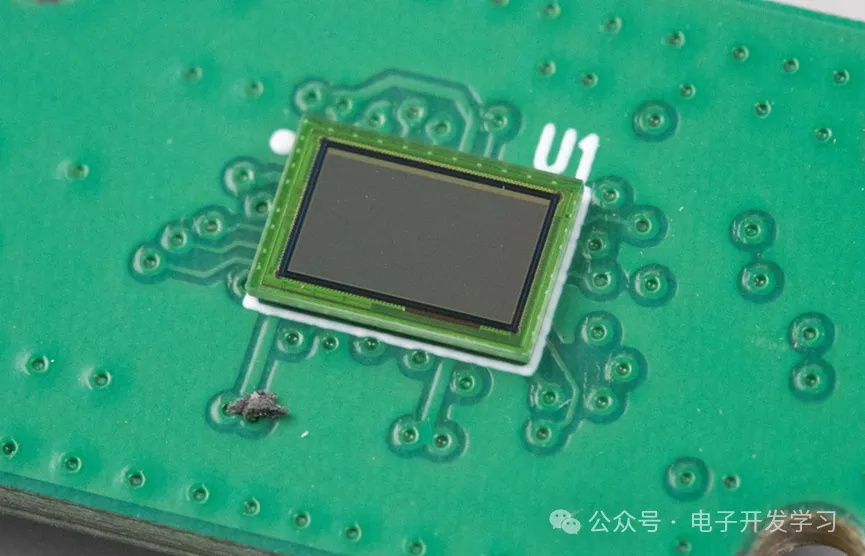
这个板子上,这颗LQFP32封装的器件,上面没有丝印,不确定是谁家的芯片,但是看着很不高级的样子。
板子背面这个传感器看着就是个CMOS传感器,更具体的信息我也没法确定。另外,板子左下角有一个BL24C08,来自贝岭的EEPROM。
传感器特写。
接收端很明显是一个镜头,还有三颗螺丝固定,我尝试把它拆下来看看。

拆下来之后的镜头模组。
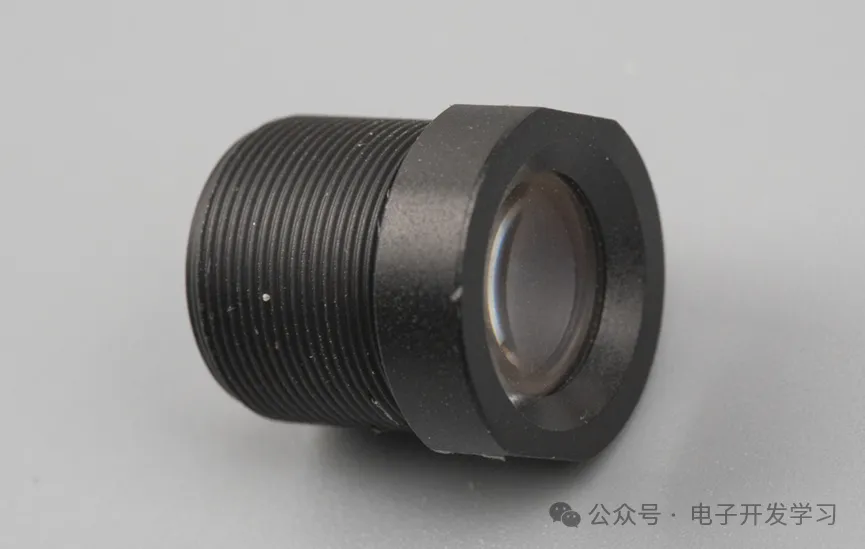
这个滤光片,应该是带通的,只允许激光发射器发出的光谱通过,其他波段的光不能通过。

顺便把激光发射器也拆下来。

上面有丝印:JLR21DNH2281。我写文章的时候留意到,这个激光发射器还可以继续拆解,不过这事留着以后干吧。

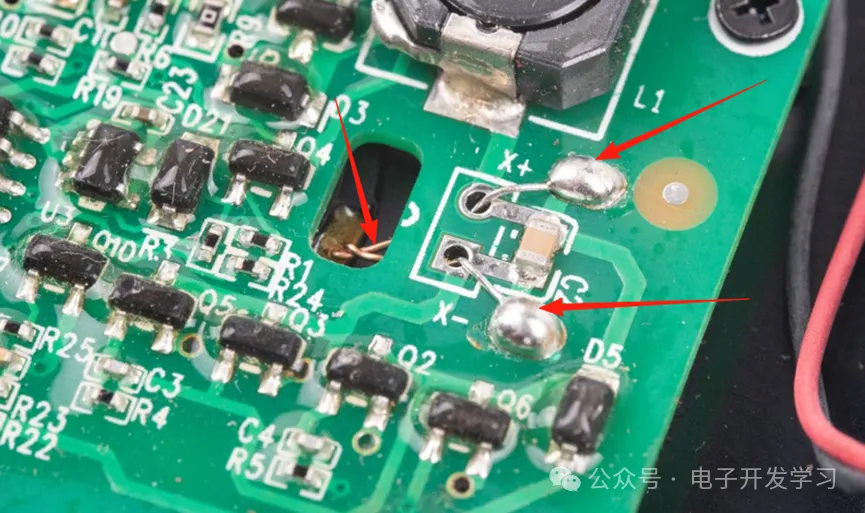
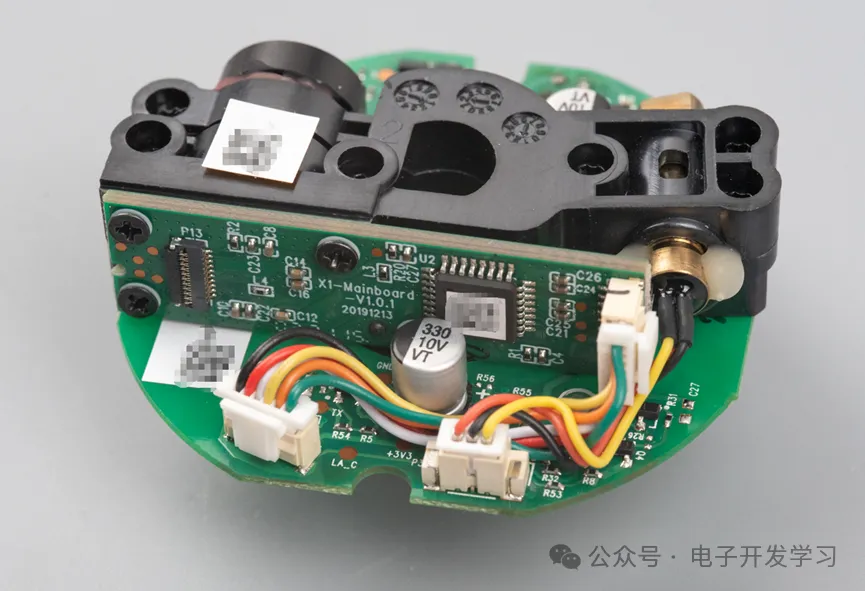
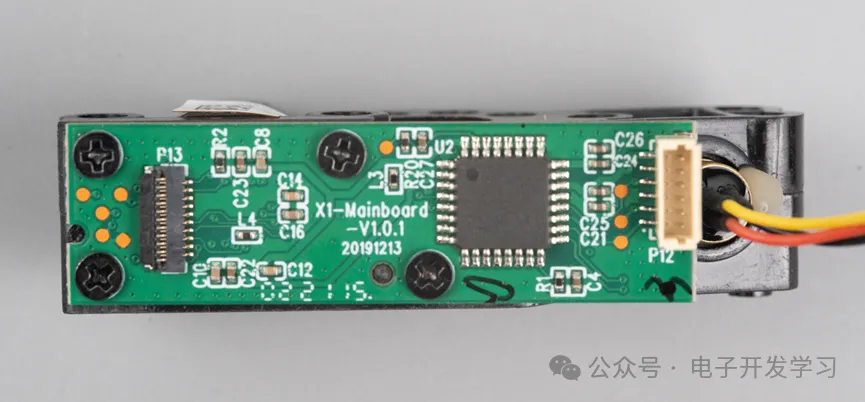
这是底板上的接口,上面的SHB1.0 6P连接器连接的就是前面说的那个激光接收板,下面这个3P的连接器连接的是激光发射器。所以下面这三个管子也构成了激光发射驱动电路,但是看着很一般的样子,我之前做激光驱动,可以做到175ps的上升沿,我猜这个板子上的驱动电路远远达不到这个指标。
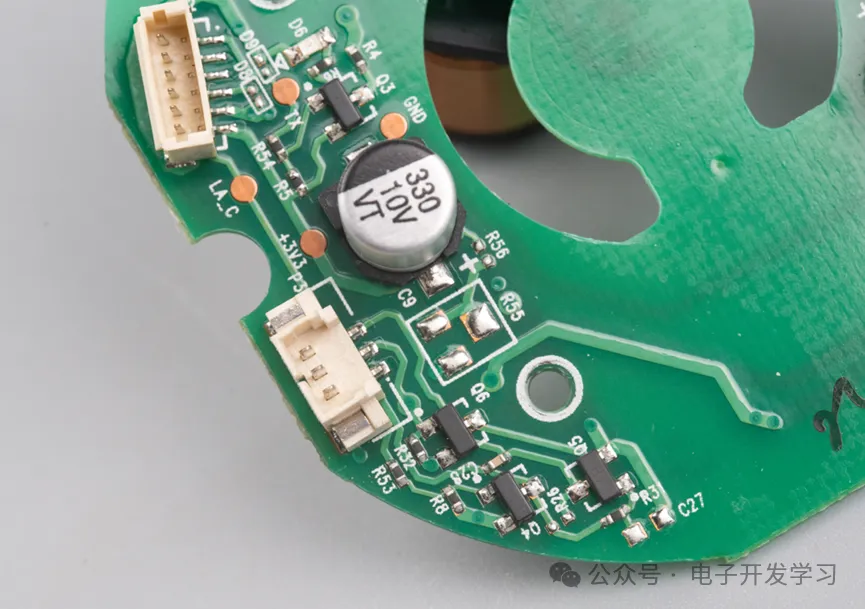
这个板子另外一边是电源整流电路,先把传输过来的交流电通过四个二极管整流,然后稳压之后给激光发射和激光接收供电。右边的丝印DE=33X的封装SOT23-5的器件,闭着眼睛猜应该是一个3.3V输出的LDO。上面还有一个丝印C14J的封装为SOT23-5的器件是做什么的呢?看看它的第二脚连接到一个通孔引脚了,这个引脚刚好是下面这个器件的四个引脚之一。
这个是一个光电编码器。也就是说这个丝印C14J的器件,它的功能是处理编码器输出,根据丝印可以查到这个芯片是SN74LVC1G14DBVR,单通道施密特触发器。
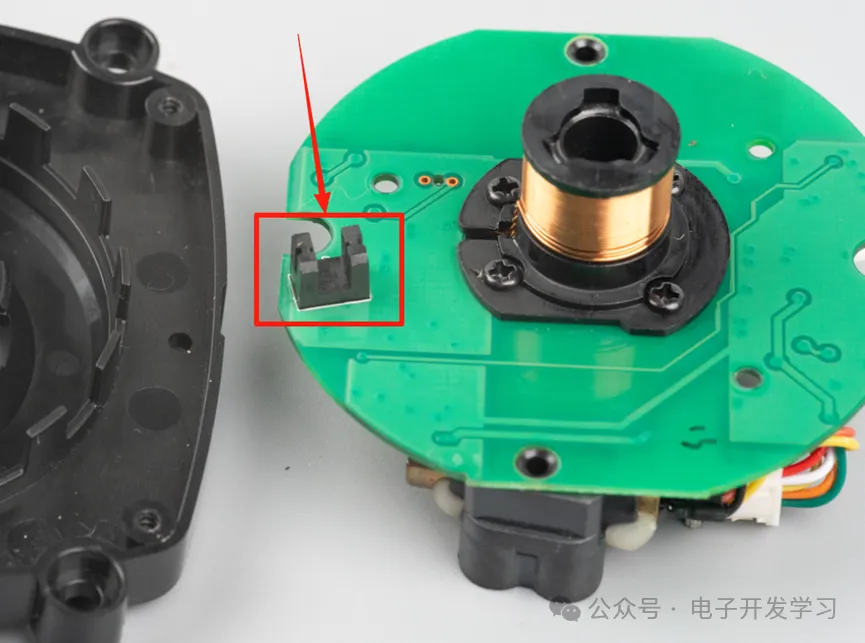
仔细观察编码器的齿就会发现,一圈齿的宽度都一样,只有一个宽度比其他的窄很多,这种单零位齿宽差异用于复位。

固定激光发射器和接收镜头的这两个件,看着特别像金属,但是我感觉它应该是塑料,查了一下,说这个是LDS塑料(激光直接成型,表面金属化)或者镁合金压铸(轻量化+EMI屏蔽)。简单测试了一下无磁性、掰断之后断面看着确实是塑料材质,但具体材料不明,还需要大佬们留言区赐教。

电机。

轴承。

全家福。

这就是扫地机的激光雷达拆解全过程,欢迎大家留言交流讨论。













登录 或 注册 后才可以进行评论哦!