












 互动量:263
互动量:263
上一期学习了任务的创建和删除,这一期学习任务的挂起与恢复。
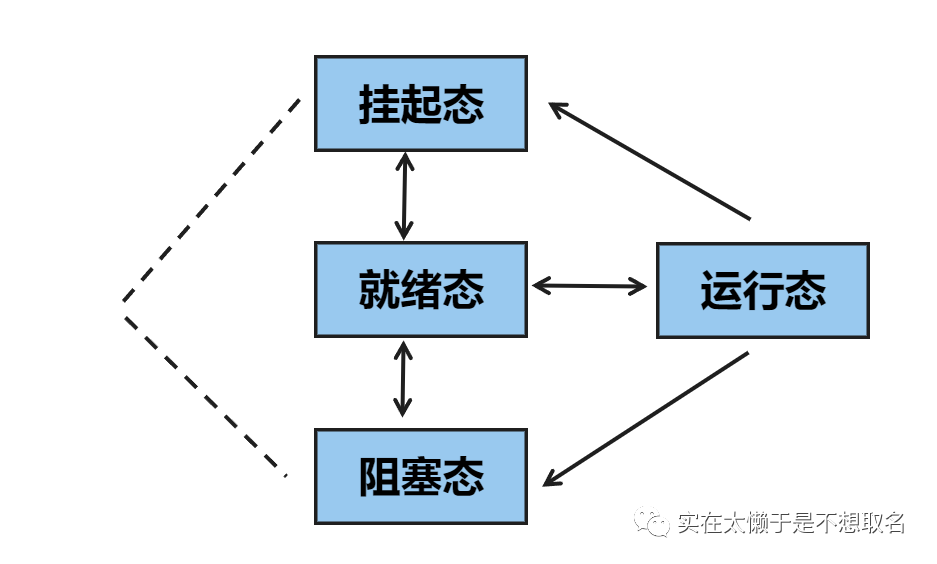
所谓的挂起,也可以认为是 暂停 ,将运行中的任务挂起后,任务将暂停运行,直至系统恢复任务的运行。
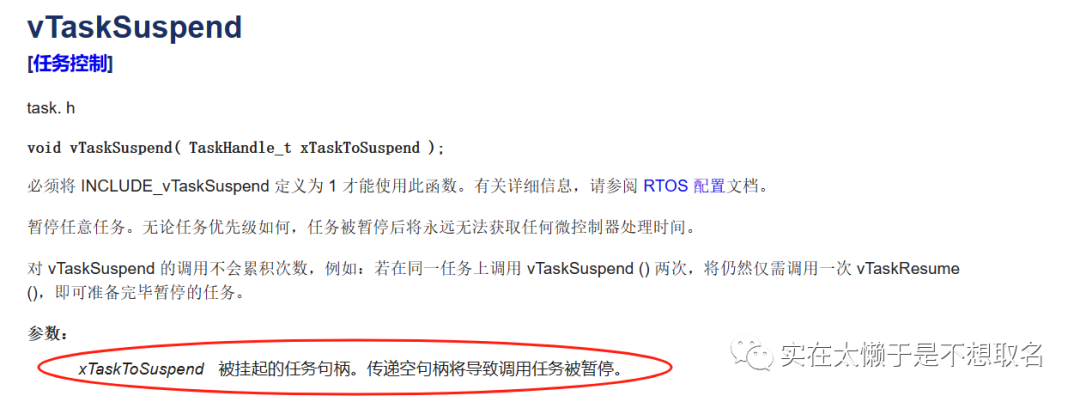
在FreeRTOS的API文档中找到任务挂起函数的介绍,函数需要的参数为我们想要挂起的任务句柄,如果传递为NULL则暂停我们的调用任务。
同样的,在文档中也可以找到恢复任务函数介绍。
接下来我们实现一个任务,目标是当LED1闪烁5次后挂起LED0闪烁的任务,当LED1再闪烁5次后恢复LED0闪烁的任务。
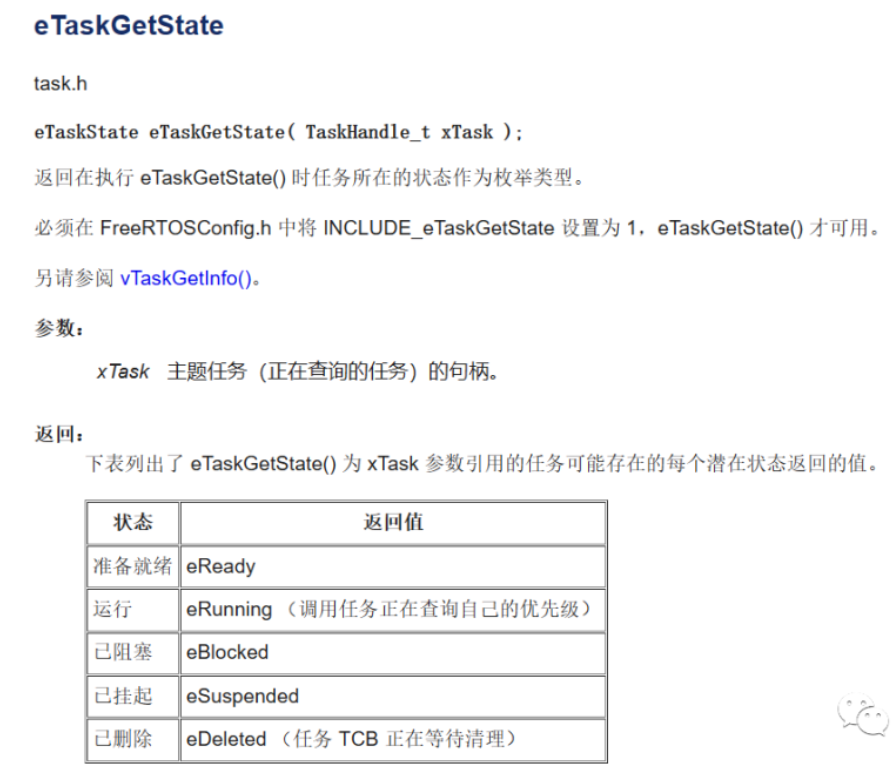
我们在API中找到查询任务状态的函数eTaskGetState,该函数传入参数为任务句柄,返回参数为任务状态。
LED0在进行vTaskDelay时是处于阻塞态,因此我们只需要判断LED0是阻塞状态还是挂起状态,再进行挂起和恢复操作。
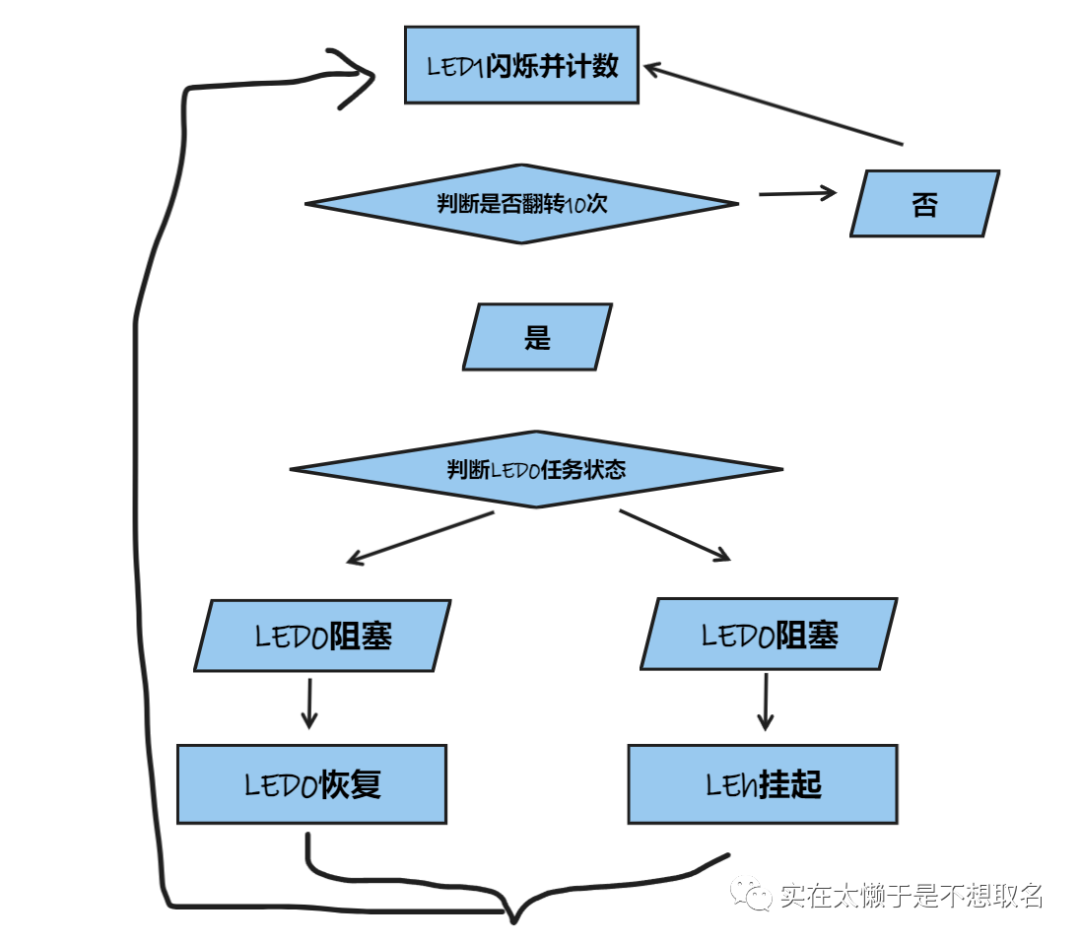
因此我们的代码如下
void LED_TOG2(void * pvParameters)//参数为 void * pvParameters
{
while(1)
{
printf("LED_TOG2 running\r\n");//串口打印运行信息
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_9);//LED0翻转
LED2_Number++;//LED0翻转计数
if(LED2_Number %10==0)
{
if(eTaskGetState(LED_TOG_Handler) == eSuspended)
{
vTaskResume(LED_TOG_Handler);//LED0任务恢复
}
if(eTaskGetState(LED_TOG_Handler) == eBlocked )
{
vTaskSuspend(LED_TOG_Handler);//LED0任务挂起
}
}
vTaskDelay(500);//延迟500ms
}
}
#FreeRTOS#
 #FreeRTOS#
#FreeRTOS#
硬创社













登录 或 注册 后才可以进行评论哦!