












 互动量:157
互动量:157
前段时间玩手机时看到一个无人机做的不错,最重要的是桨叶做了完整的防护。我感觉可以买回来在室内飞一飞玩。

到货后大概这个样子。

我先试飞了一下,你别说它飞的还真挺稳的。

从下往上给它拍了一张悬停的图。

开始拆解、先把电池从电池仓里取出来。

接下来把图传模块拿下来。它和飞控之间通过一个4Pin的硅胶线连接,估计是串口和电源、地。

接下来就拆开外壳。这时候可以看到的绿色板子就是飞控板。
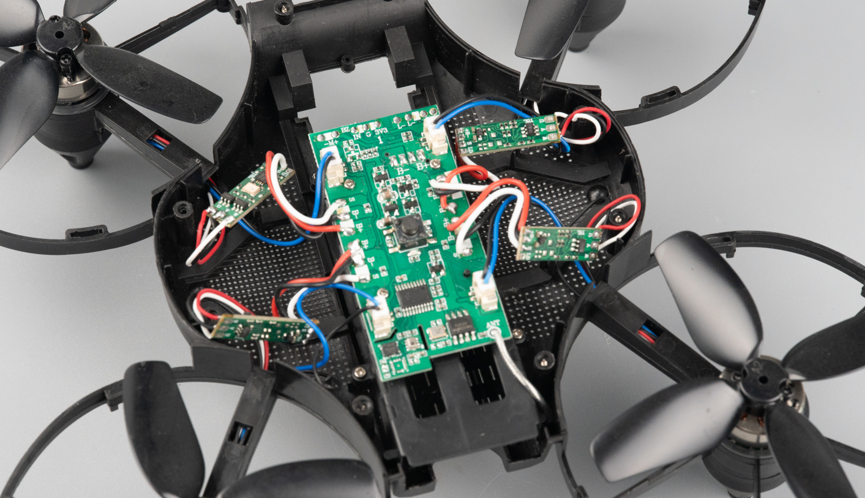
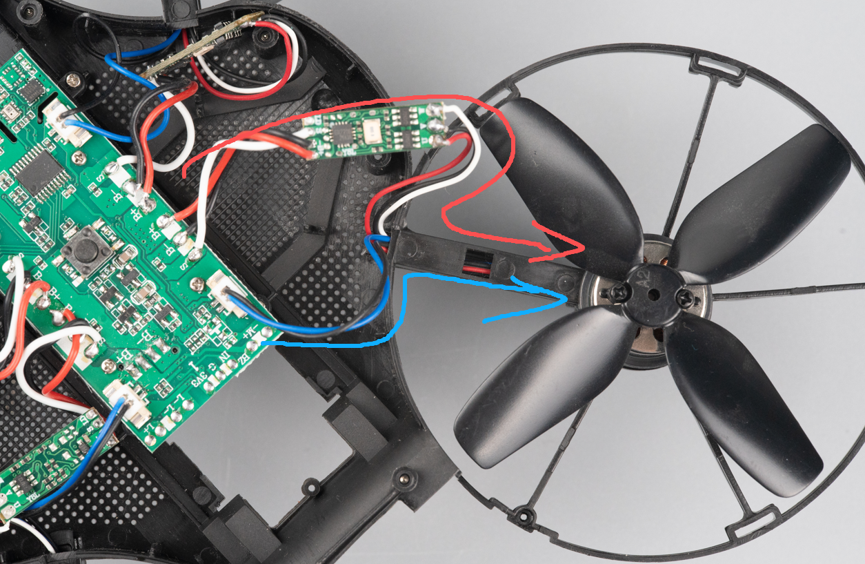
飞控的四个角上连接了四个电调板。
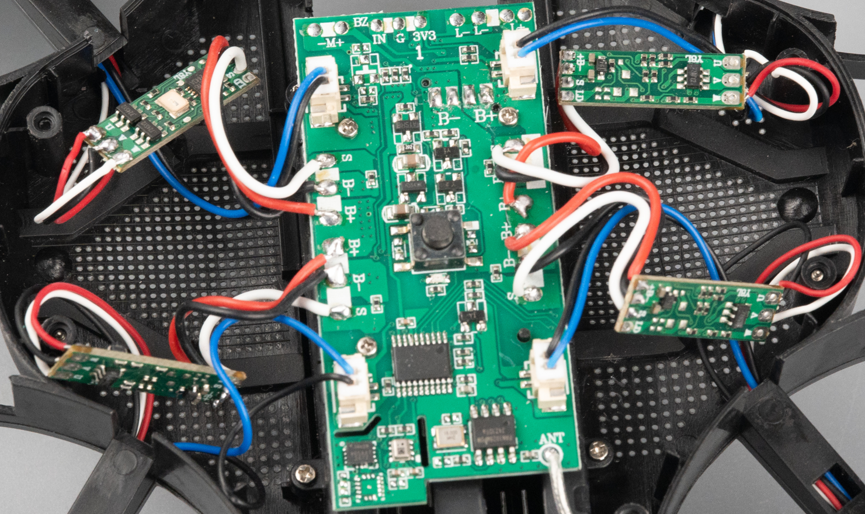
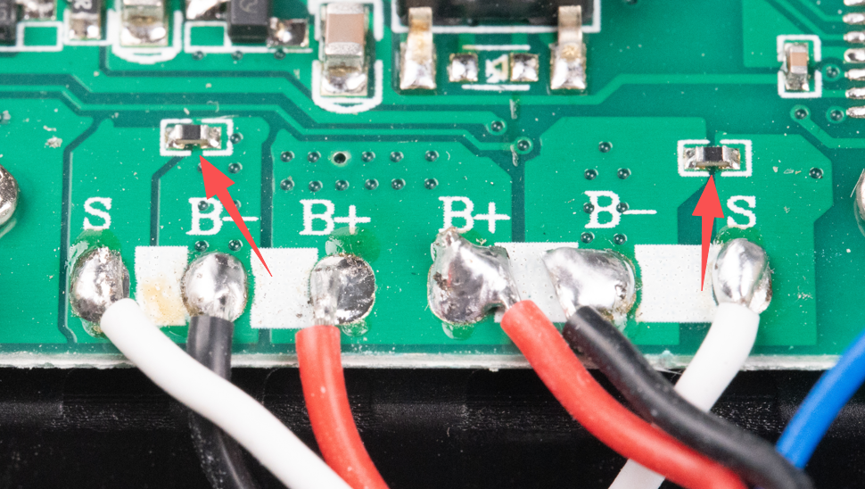
仔细看,从飞控到每个电调板,都有三根线,分别是红色电源、黑色地、白色PWM信号。另外,飞控到每个机臂还有黑色和蓝色的两根线,这显然是连接到机臂LED灯了。
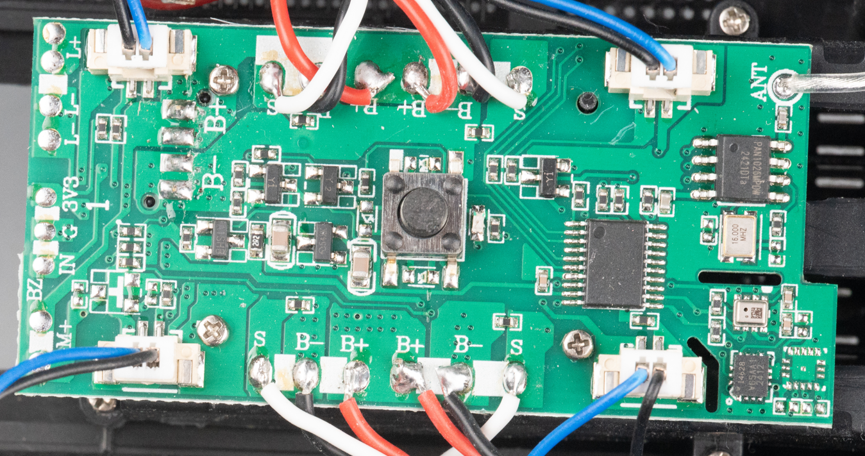
飞控中间是开关机按键。MCU是一颗SSOP-20封装的单片机。2.4G射频遥控用的是PAN1026,这是一个SOP-8封装的GFSK协议的射频芯片。
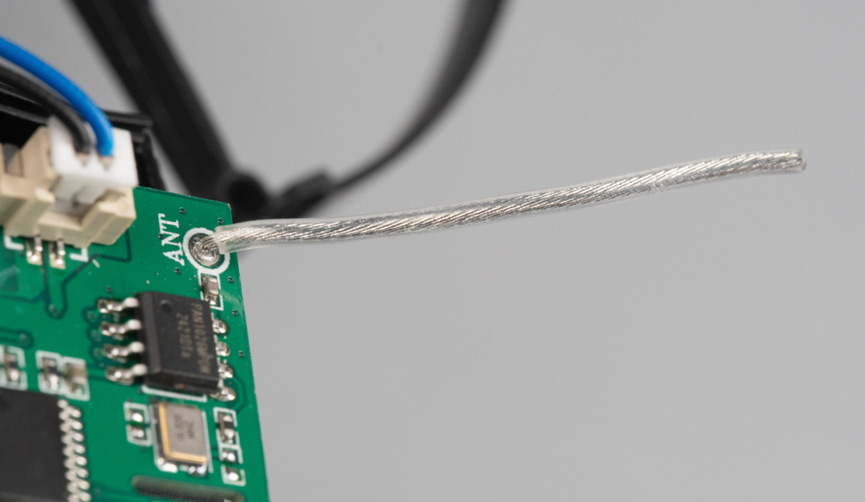
这是2.4G遥控的天线特写。
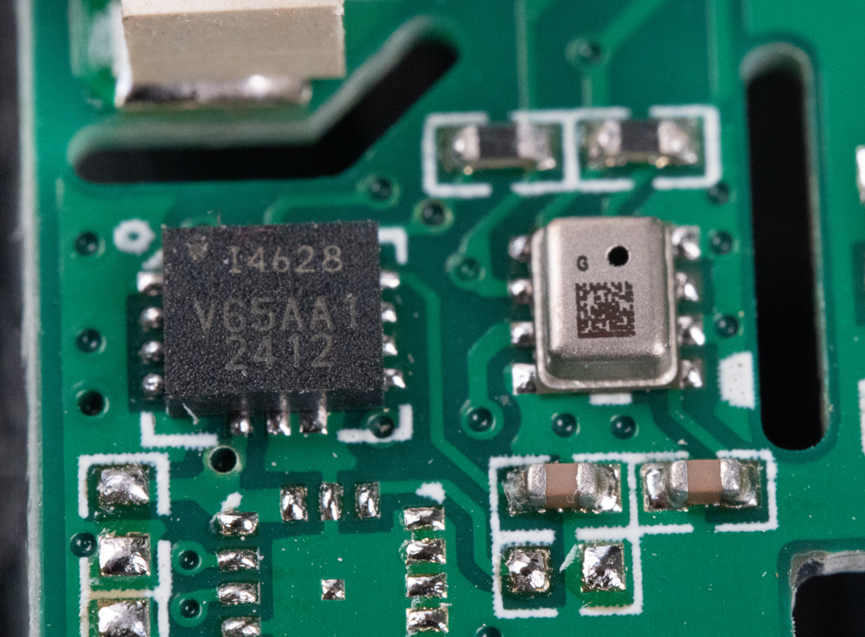
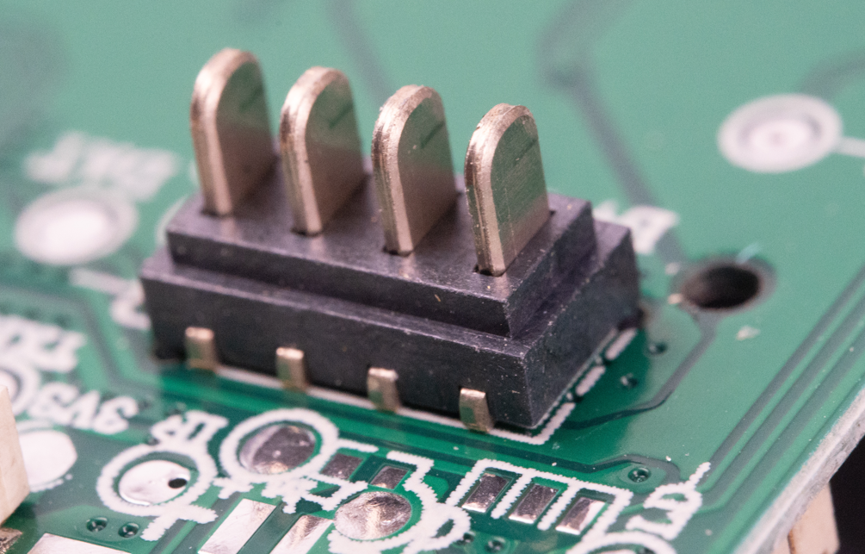
另外飞控板右下角有一个气压计和一个陀螺仪,这两颗传感器周围做了开槽,这样的操作主要是为了减少机械应力(焊接应力、飞控安装应力)和震动传递,同时改善热稳定性,保证传感器测量的精度。毕竟MEMS加速度计和陀螺仪对温度变化比较敏感。
这个三轴加速度计陀螺仪器件的丝印是I4628,我感觉像是ICM-42688-P,封装形式也一样。但是ICM-42688-P一般丝印是I428P。这个器件是无人机能够稳在空中的关键器件,它可以检测到飞机倾斜的角度,从而让飞控调整四个电机的转速,让飞机趋于平稳。
这是一套典型的自控系统,我们的期望值是飞机水平稳定在空中,但是由于这个系统本身是个欠稳定系统,所以它势必会翻车,但是MCU可以以200Hz甚至更高的速率读取三轴加速度计陀螺仪的姿态数据并解算出欧拉角,再通过期望的角度和实际欧拉角的差值进行PID计算,最终驱动四个电机速度变化,调整飞机姿态让它逐渐接近我们的期望——水平稳定在空中。
当然,实际的飞控算法可能更复杂,姿态环一般用串行PID算法。而且实际上也不是工作在姿态环,外面还有位置环,高度环等等。但是所有控制最后都施加到了姿态环,最终通过输出PWM控制电机转速来控制飞机实现各种复杂的飞行任务。
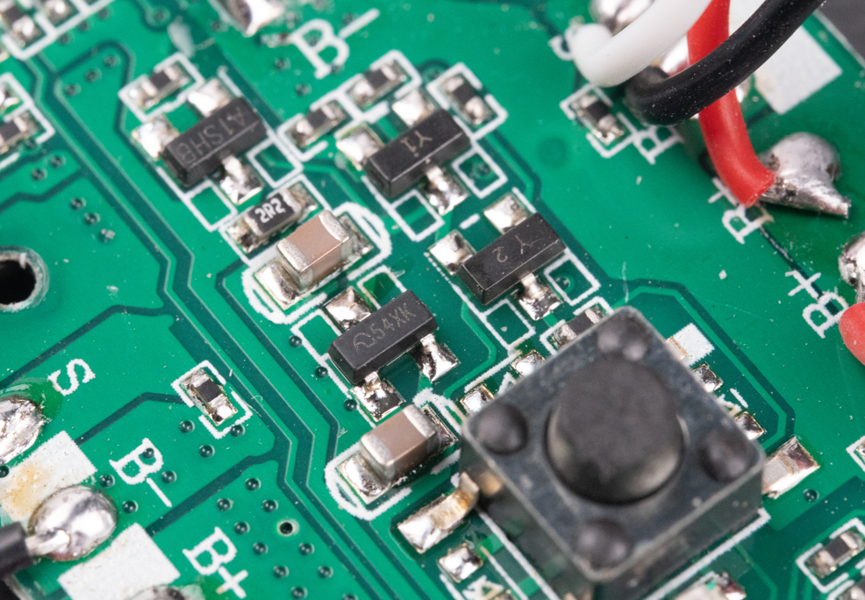
按键旁边的三极管、MOS管是一键开关机电路,另外还有一颗LDO。
电调的PWM信号上都加了对地的下拉电阻。
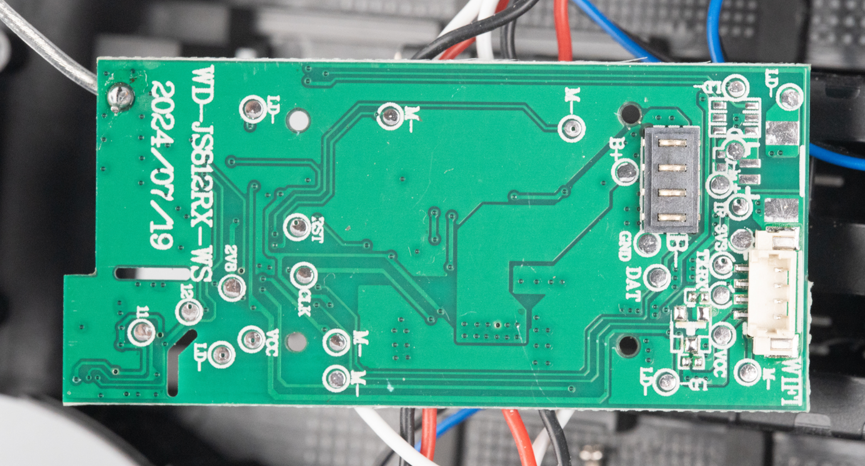
飞控板背面只有电池连接器和图传连接器,另外就是各种信号的测试点。
电池连接器特写。
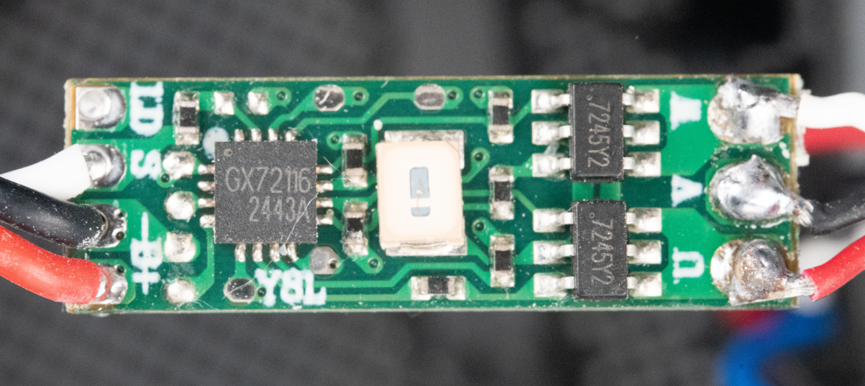
接下来看一眼电调。电调上用了一颗GX71226,这器件我没搜到是什么型号,理论上应该是一颗单片机,接收PWM信号然后驱动6个MOS管组成的三相H桥,来驱动直流无刷电机。
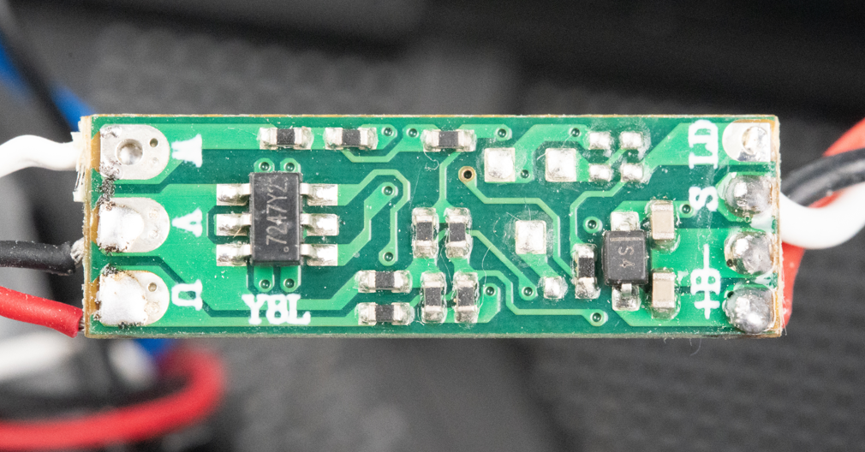
这是电调板背面,咦,为啥正面和背面总共只有3个MOS,不应该是6颗吗?
那是因为这个丝印7245Y2,封装SOT23-6的器件内部实际上封装了两个MOS,一个是上臂开关,一个是下臂开关,所以这样一个器件就驱动一个相线。至于这个器件型号是什么,我是真找不到。汕头这些做玩具的,估计专门针对这种无人机定制了这些器件。
拿其中的一个机臂看,从飞控板给电调提供电源和PWM信号,电调板最终输出UVW三个相线驱动,驱动电机按照飞控要求的速度转动。

拆掉电机支腿。
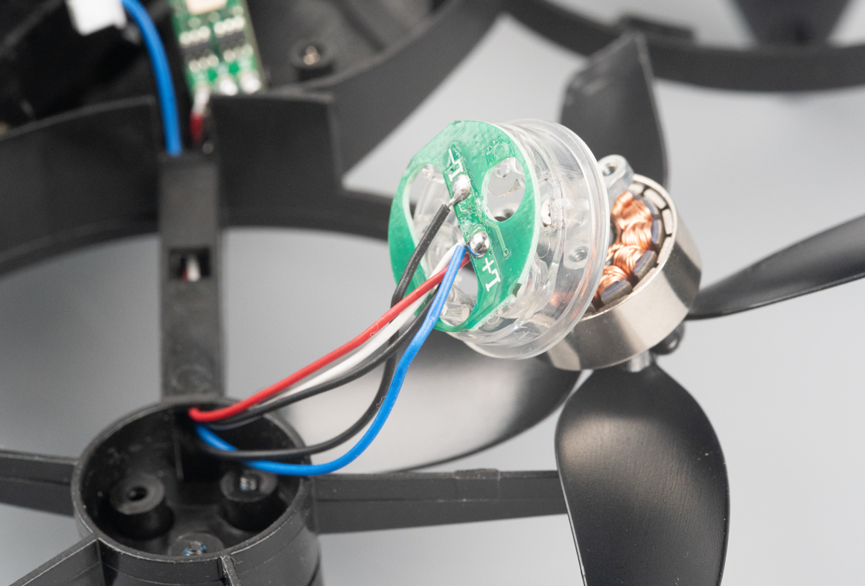
这样就可以把电机和桨叶从电机安装座里拿出来了。顺便拿出来的还有灯板和透明的导光板。
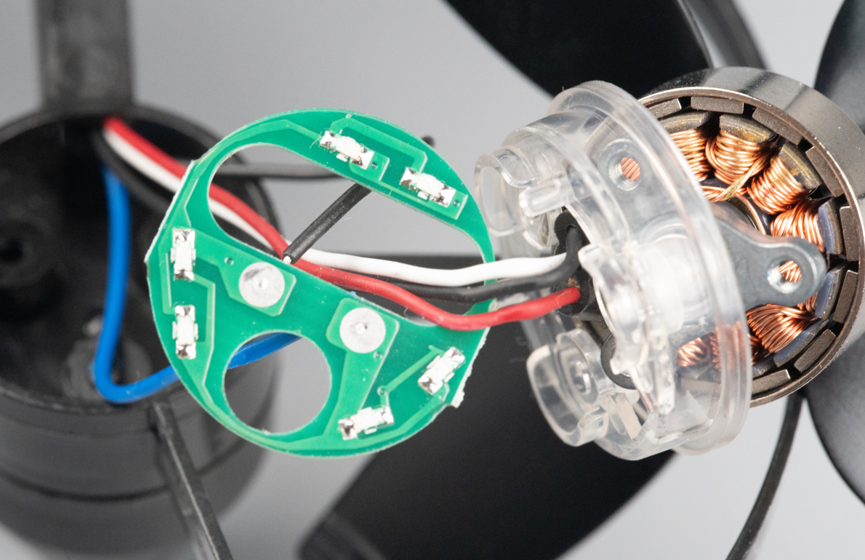
灯板上有6个贴片LED灯。这些LED采用了2并3串的形式。电机UVW相线穿过了灯板上的胶囊形开孔。
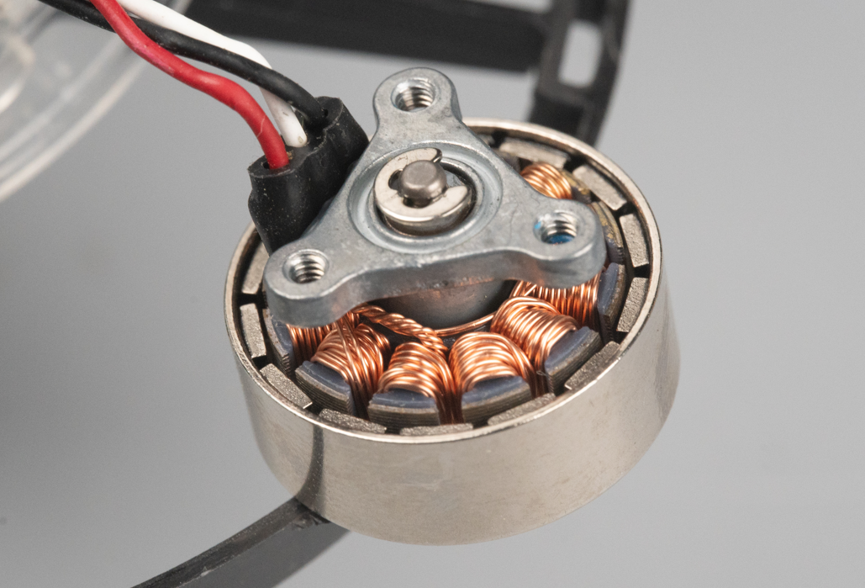
重头戏,这个电机我搜了一下是1503电机。现在网上可以买到一个价格3块左右。
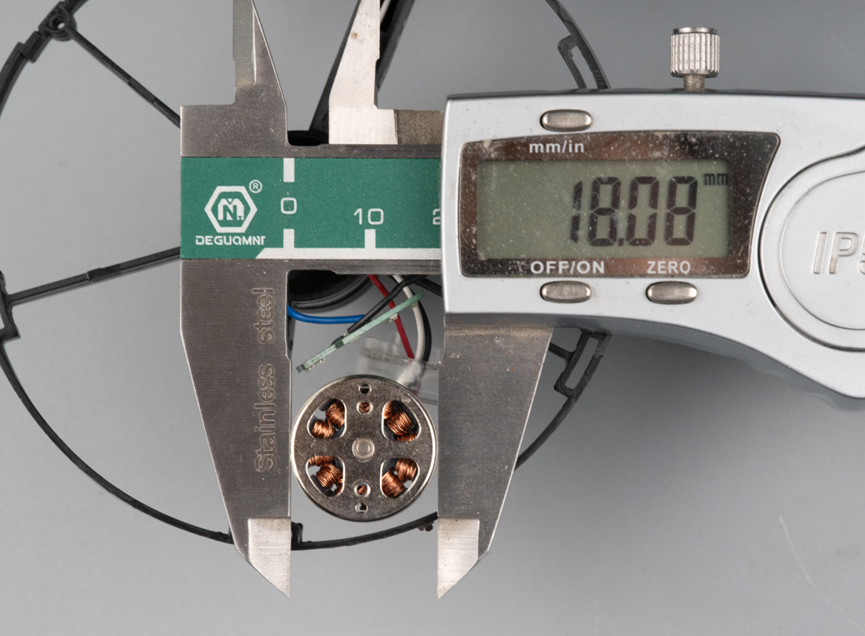
电机直径是18mm左右,那么为啥叫1503呢,这是因为15mm是指定子直径。我去看了一下我的大疆Mini2无人机,用的好像也是这个尺寸的电机。
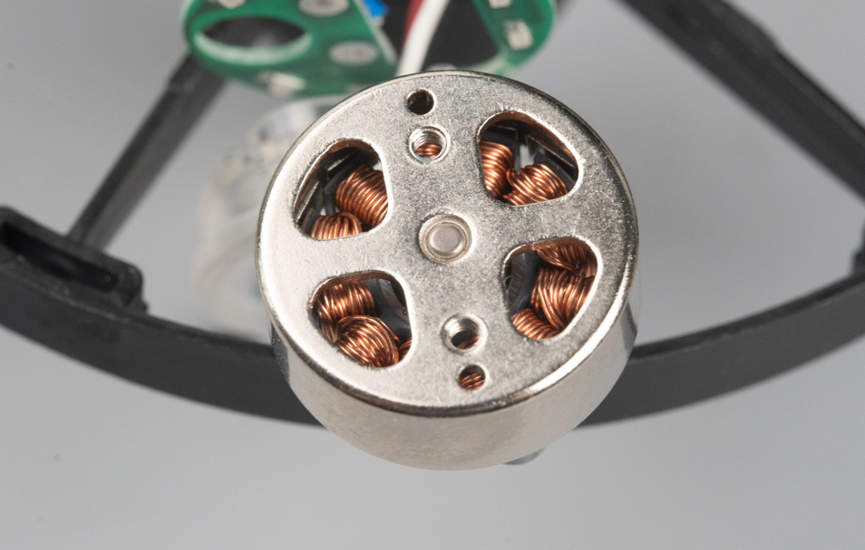
这个电机有两种形式,一种是有出轴的,一种是无出轴的,这个无人机上用的显然是无出轴的。

桨叶采用的是四叶桨,我去找了一圈,卖这个桨叶的不多。也就是说能给这个电机配套的桨叶不太好找,但是有。
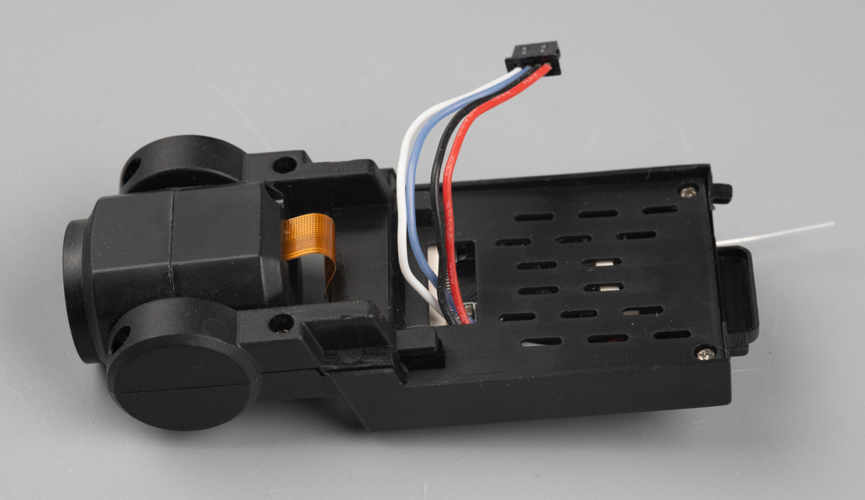
接下来看看图传模组。
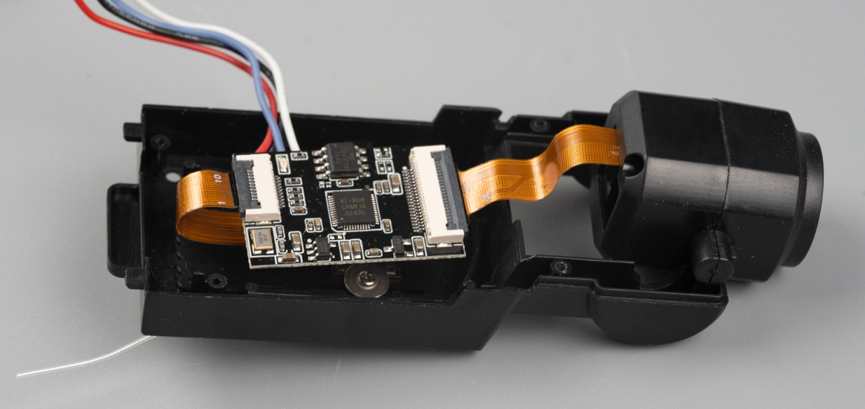
图传的电路板似乎比较简单。

又用了一颗不知型号的芯片。
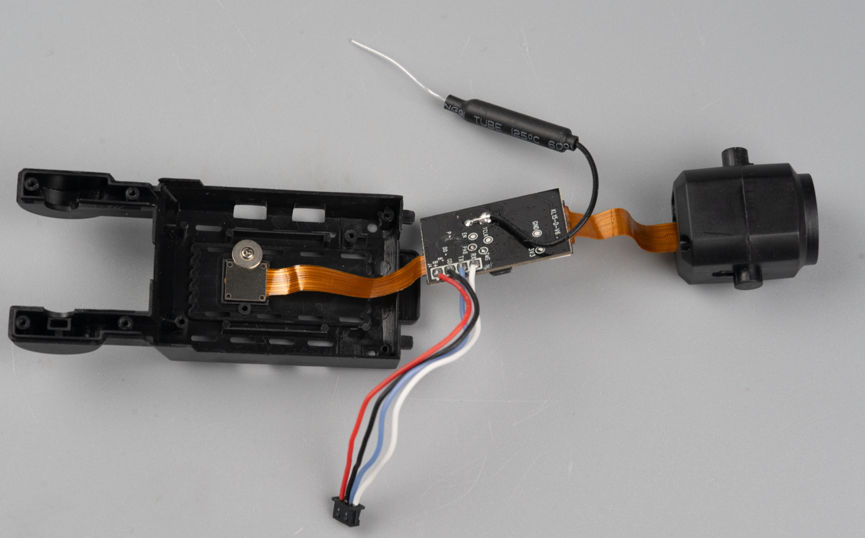
这个板子上接了两个FPC软排线,分别连接到了摄像头和无人机肚子上的光流传感器。
以上就是这套玩具无人机的拆解,不得不说汕头玩具厂在玩具的成本把控上简直惊为天人。这种无人机我很容易可以做出来,但是我永远做不到他们这么低成本。













登录 或 注册 后才可以进行评论哦!
还没有评论,抢个沙发!